4. 配置与使用
4.1 PXI机箱与飞控接口
本节内容暂时只针对四旋翼X型布局介绍
使用到的PXI机箱上接口以及作用见下表
| 接口 | 用途 |
|---|---|
| PWM输入 | 接收来自飞控的PWM电机控制信号 |
| SPI | 飞控与PXI机箱进行传感器数据的通信 |
| CS | 模拟传感器的片选引脚 |
| GPS(UART) | 向飞控发送GPS原始数据 |
| PPM输出 | PXI向飞控发送遥控器PPM信号 |
| PPM输入 | 接收来自遥控接收机的PPM信号 |
下面是具体的介绍:
-
PWM输入(电机接口)
本仿真平台所用的Simulink模型以及Pixhawk全部按照下面图示电机序号统一设置,这也是一种通用的设置方案:

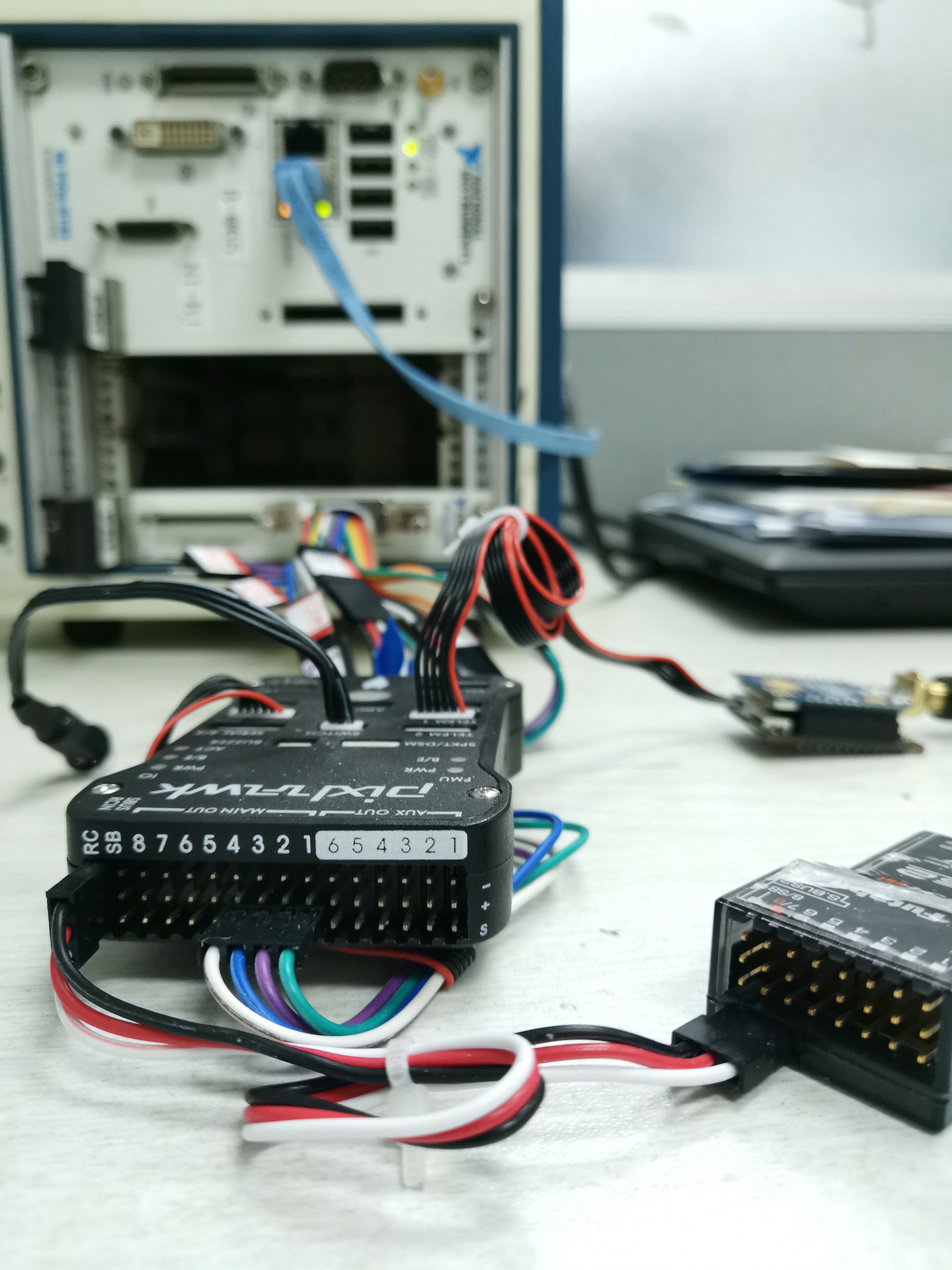
PXI机箱引出的四条PWM信号输入线(用于接收飞控发出的电机驱动信号)线序是
线序 含义 电平 1 PWM1 +3.3V 2 PWM2 +3.3V 3 PWM3 +3.3V 4 PWM4 +3.3V 对应的飞控Pixhawk上顺序如下图:
上图中彩色箭头标出的1、2、3、4 信号接口分别对应PXI机箱的PWM1、PWM2、PWM3、PWM4四条线。将他们对应连接即可。需要注意的是上图中从上数,第一排针脚是GND,第二排是VCC,第三排是信号,对于PWM自然就是PWM输出信号。
- PXI机箱上的PWM四条信号线上在接口处标有序号
-
SPI(传感器通信接口)
这部分分为两部分:
- SPI接口
- 传感器片选CS接口
PXI机箱:
机箱上的SPI接口共有四根线,线序和意义如下
线序 含义 电平 1 SCL +3.3V 2 MISO(OUT) +3.3V 3 MOSI(IN) +3.3V 4 GND +3.3V 注:PXI一侧为SPI从机
机箱上的CS接口共有四根线,线序和对应的传感器如下
线序 含义 电平 备注 1 LSM303D +3.3V 磁力计和加速度计、温度 2 MS5611 +3.3V 气压计、温度 3 MPU6000 +3.3V 加速度计和陀螺仪、温度 4 L3GD20 +3.3V 陀螺仪、温度 Pixhawk:
对于新的飞控板需要将自有传感器取下,将SPI线和CS线引出,然后按照前面所述对应连接即可。如果手里已有做好接口的飞控,那么接口处应该标出了对应线序,按照接口处的标记连接即可。也可以做成防反插类型接口。
注:SPI不同于串口,SPI通信是自身MOSI引脚与对方MOSI引脚连接,自身MISO引脚与对方MISO引脚连接,SCK引脚与SCK引脚连接
串口则是,自身RX引脚与对方TX引脚连接,自身TX引脚与对方RX引脚连接
-
GPS串口
PXI机箱的GPS(串口)接口线序以及含义如下:
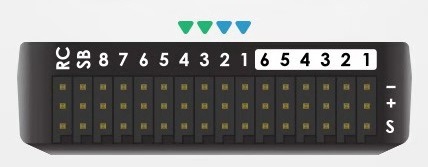
线序 含义 电平 1 RX(IN) +3.3V 2 TX(OUT) +3.3V 3 GND GND Pixhawk上的GPS接口按照其外壳上的标注连接,如下图红框所选就是GPS接口,红点一侧为1号引脚,每个引脚含义下表列出:

序号 含义 电平 1 VCC(没有用到) +5V 2 TX(OUT) +3.3V 3 RX(IN) +3.3V 4 CAN2 TX(没有用到) +3.3V 5 CAN2 RX(没有用到) +3.3V 6 GND GND 根据以上说明连接飞控与PXI机箱即可。如果已有做好接线的飞控,请按照接线接口处的标识连接。
-
PPM输出
此接口是用来做接收机故障测试时使用的,如果不做这方面的测试,可以将遥控接收机信号线直接连接到飞控上,无需使用该接口。
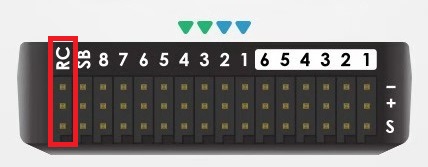
该接口只有两根线(口),一个是地线,一个是信号线,这里的信号线用来发送PPM信号给飞控。根据接口具体情况,将该接口与飞控上对应的RC口连接即可。对于Pixhawk如下图,位于红框位置,从上向下三个针脚分别是 GND、+5V、PPM。将接口与对应的PXI机箱上的PPM输出接口连接即可。机箱上的PPM接口有响应的标记。
-
PPM输入
同样,如果不是使用接收机故障测试功能,不需要使用该接口,直接将接收机与飞控连接即可。
该接口只有两根线(口),一个是地线,一个是信号线。这里的信号线用来接收来自接收机发出的PPM信号。具体接收机上的PPM信号接口,一般需要转接模块转换才能得到PPM信号,转接模块上清楚地标出PPM信号针脚的位置。请具体查看转接模块上标记。
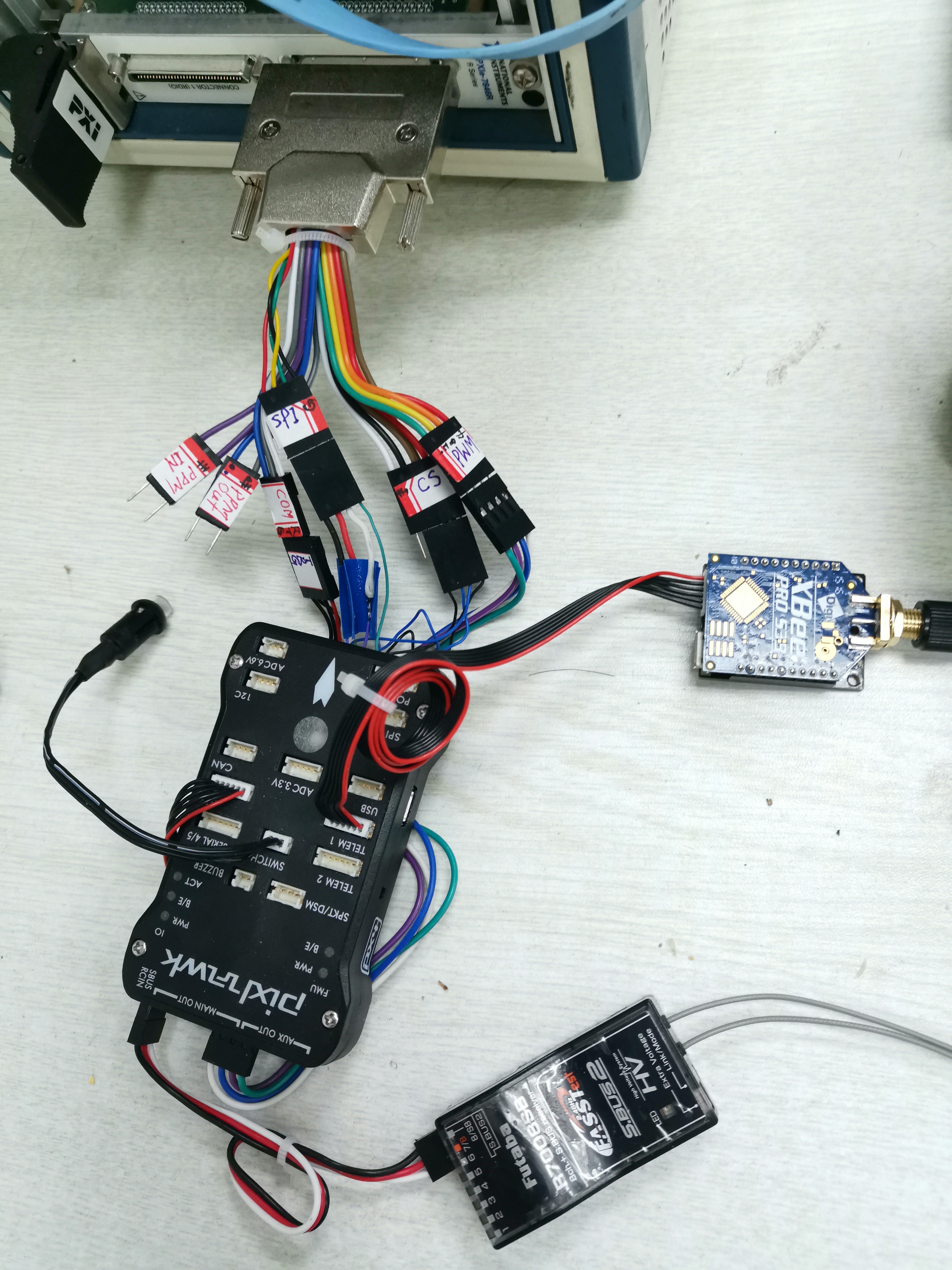
这里给出连接实物图,后期看到的可能与本图有出入,以实物为准。
4.2 Matlab/Simulink模型介绍与编译
下面介绍Simulink模型编译。
首先,项目文件中存放了我们需要的Simulink模型。Simulink模型共三个(在其中两个压缩包中 MulticopterModel.zip,FlightGearPackaging.zip):
- 多旋翼模型(核心)位于
MulticopterModel.zip中; - 执行校准模型(用来模拟多旋翼的校准过程,使得飞控可以通过校准流程)位于
MulticopterModel.zip中; - FlightGear显示数据打包模型(用来将需要发送给FlightGear的数据打包)位于
FlightGearPackaging.zip中。
编译原理:
- 利用Simulink生成代码的功能,Simulink会将我们提供的模型编译生成适用于Labview的代码(需要VeriStand2017提供支持,已经安装);
- 调用VS2010提供的编译工具链,将生成的代码编译成
*.dll文件。
上面两条都是Simulink自动完成的,过程不需要人为干预。生成的 *.dll文件才可以由Labview调用(如何调用见下一节)。本节介绍如何编译模型最后生成 *.dll文件。
-
进入文件夹
项目文件里面有三个压缩包,如下图。找到图中标出的文件,将其复制到另外的地方(路径中不要有中文名)。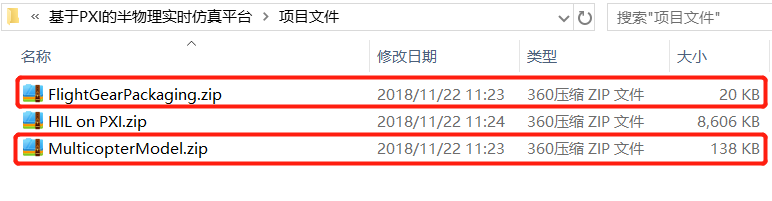
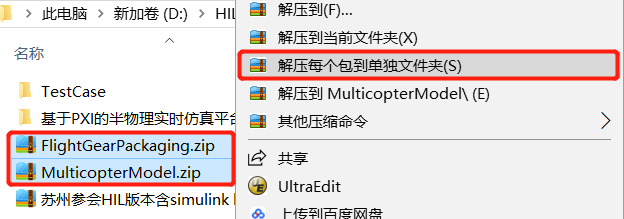
-
将复制后的两个压缩包,分别解压缩到不同的文件夹中,操作类似下图:
-
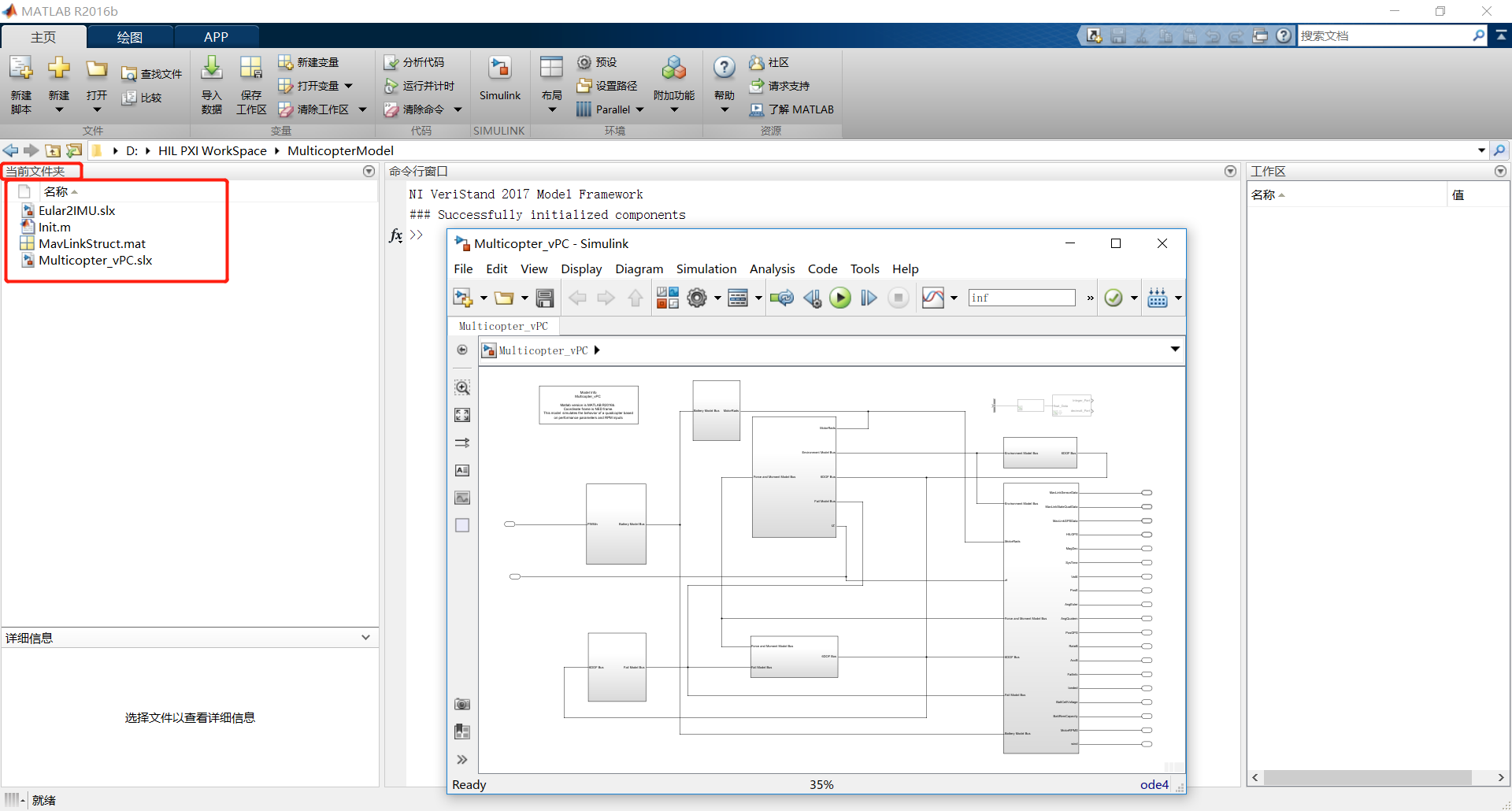
解压后, 先进入文件夹
MulticopterModel,如下图,可以看到里面有两个.slx的模型文件,这两个文件就是我们需要的模型: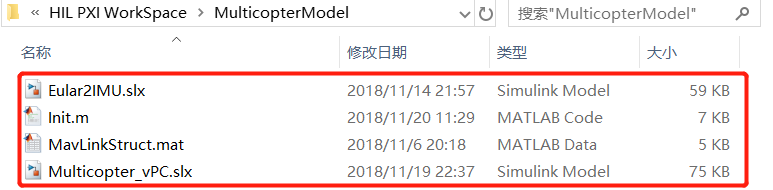
-
文件
Init.m是模型默认参数配置文件 -
文件
MavLinkStruct.mat是模型总线定义文件
-
-
首先用Matlab2016b打开文件
Multicopter_vPC.slx(多旋翼模型),打开Matlab2016b时,等待初始化完成后,应该看到下图中的两行内容,说明Matlab2016b已经成功加载VeriStand2017的支持文件:
请将Matlab工作文件夹导航到打开的模型所在的文件夹,如下图:
-
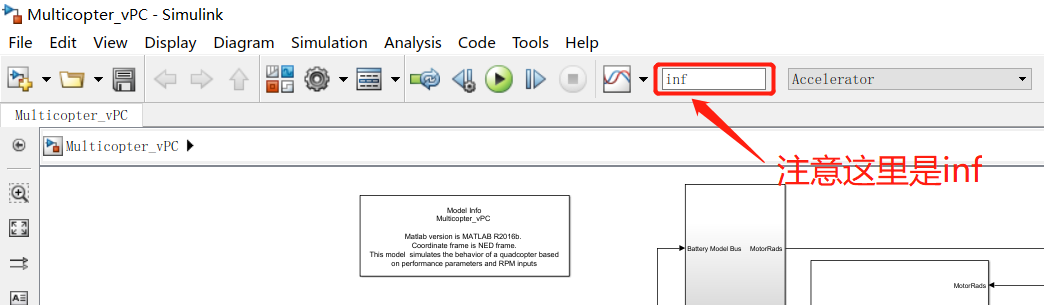
视线转移到打开的模型中,编译前请确认几点注意事项(提供的模型默认情况下,可以直接编译),见下图
之后点开下图中的设置按钮

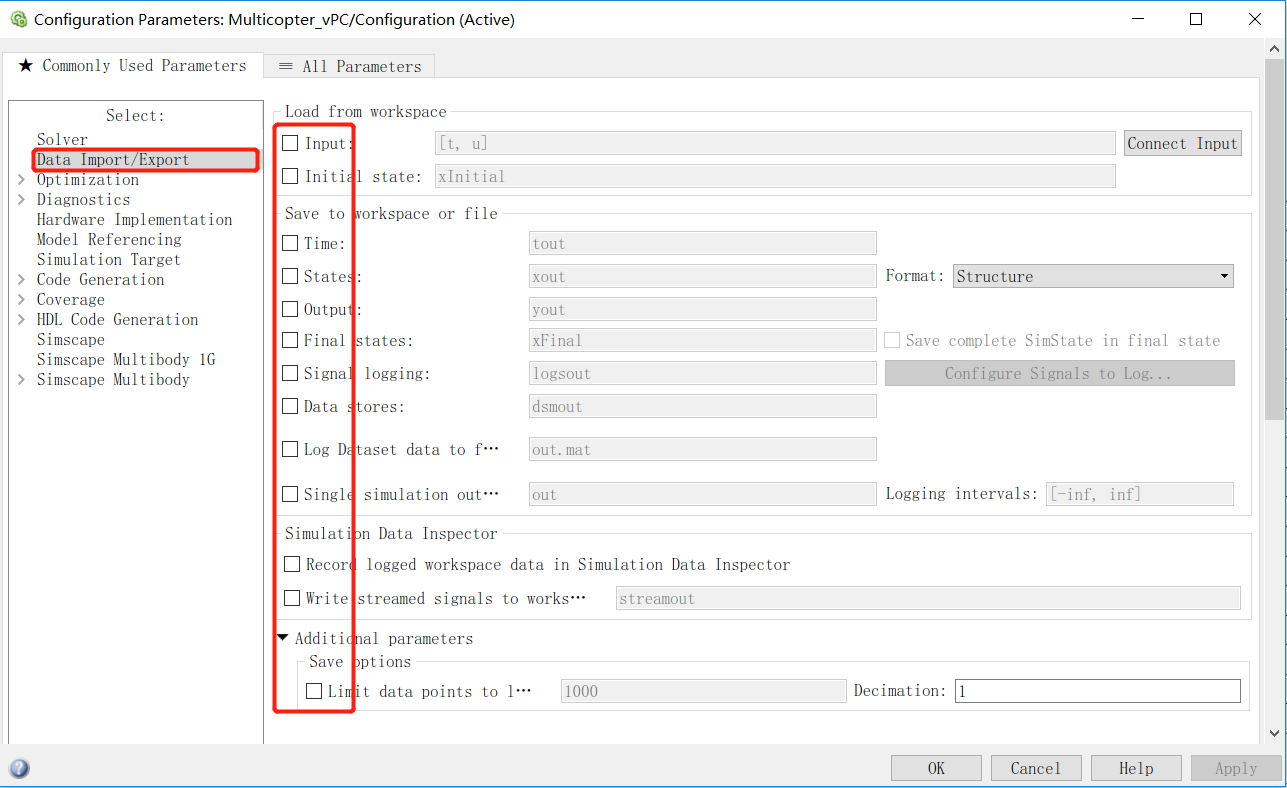
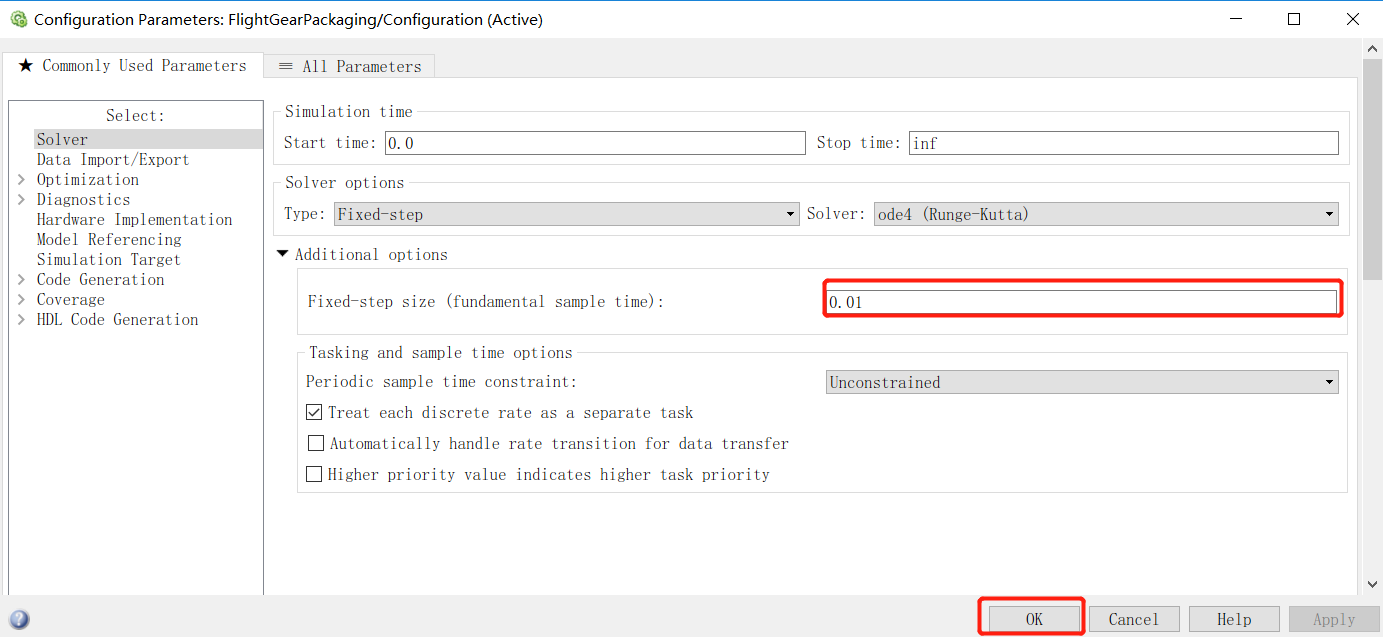
在弹出的设置窗口中,选择左侧的
solver,然后确认右侧的内容与下图标红的内容是一致的。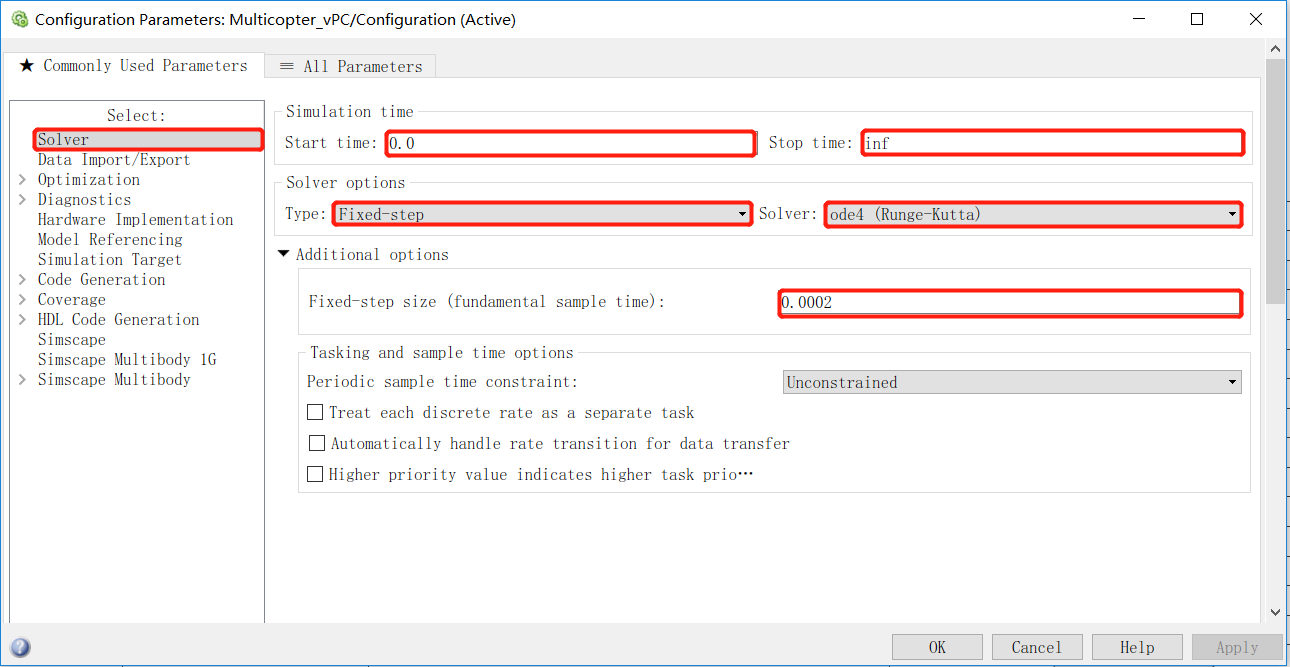
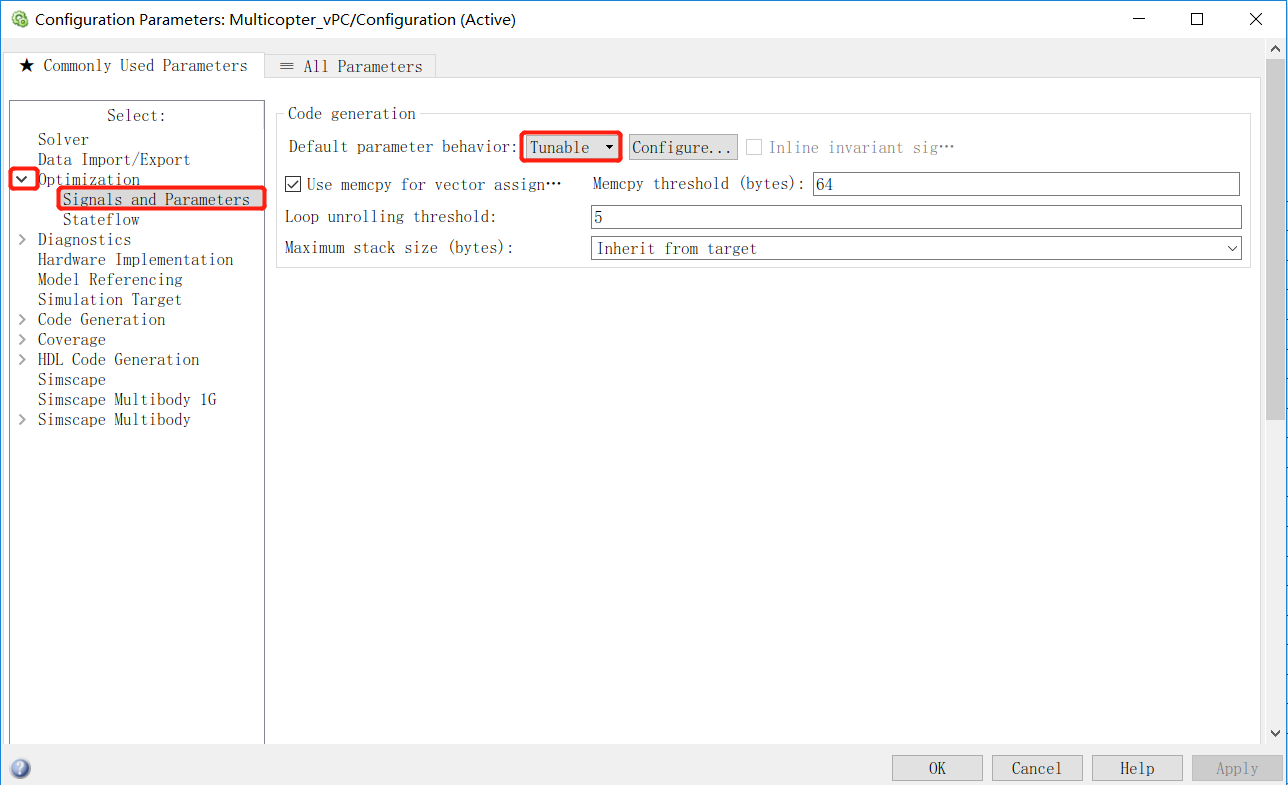
下图同理,确认设置内容与下图相同:
确认设置内容与下图相同,这里是要确保生成模型文件参数是可调的:
下图中
NIVeriStand.tlc就是前面提到的,VeriStand2017支持文件。确认图中标记处与设置相同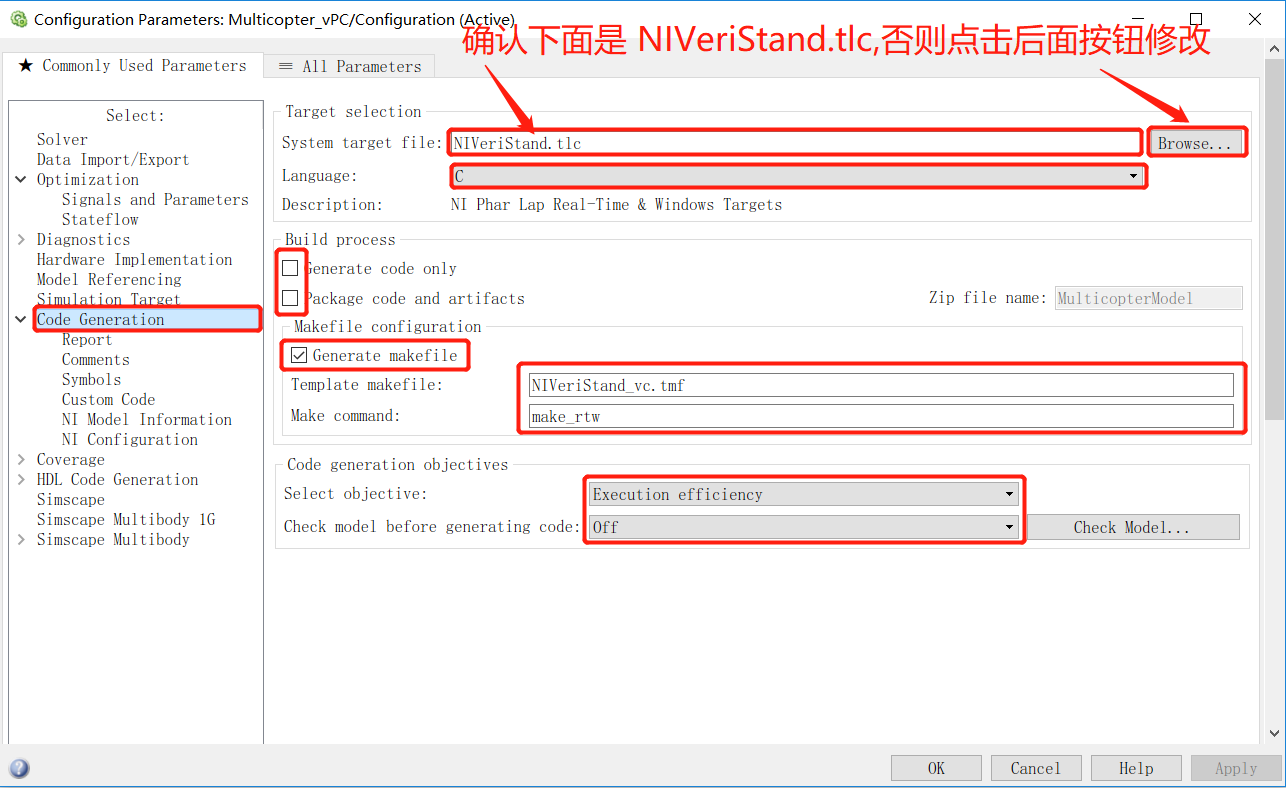
确认设置内容与下图一致。
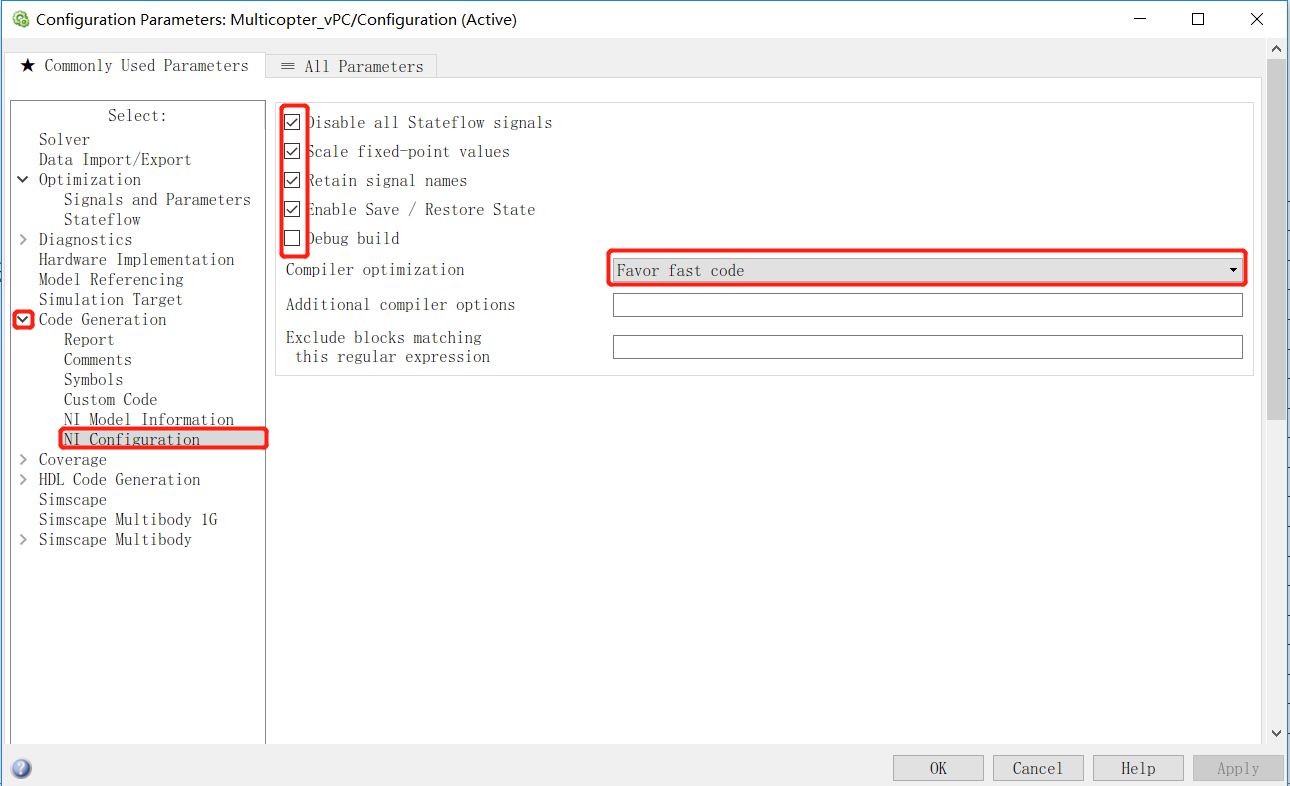
确认无误后,点击
OK完成退出。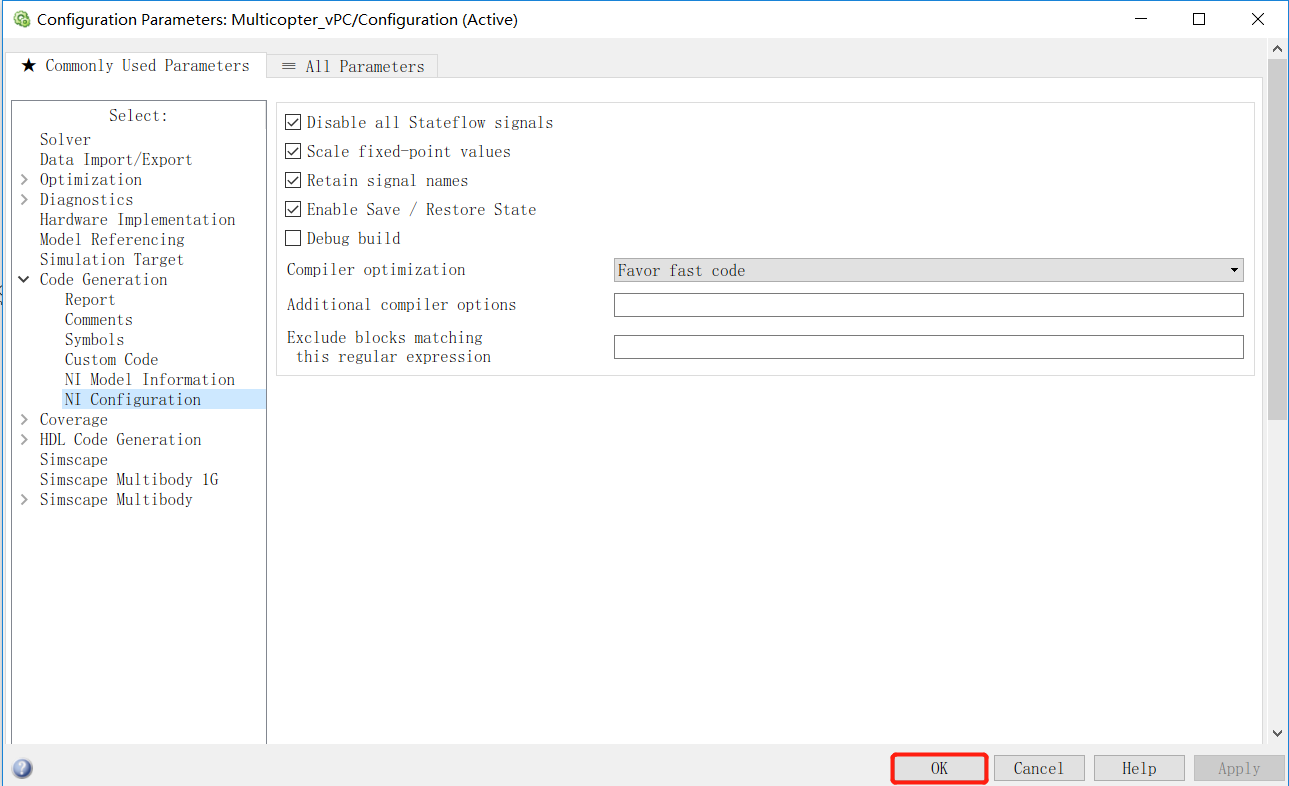
-
然后编译:点击下图中所示按钮,编译模型。

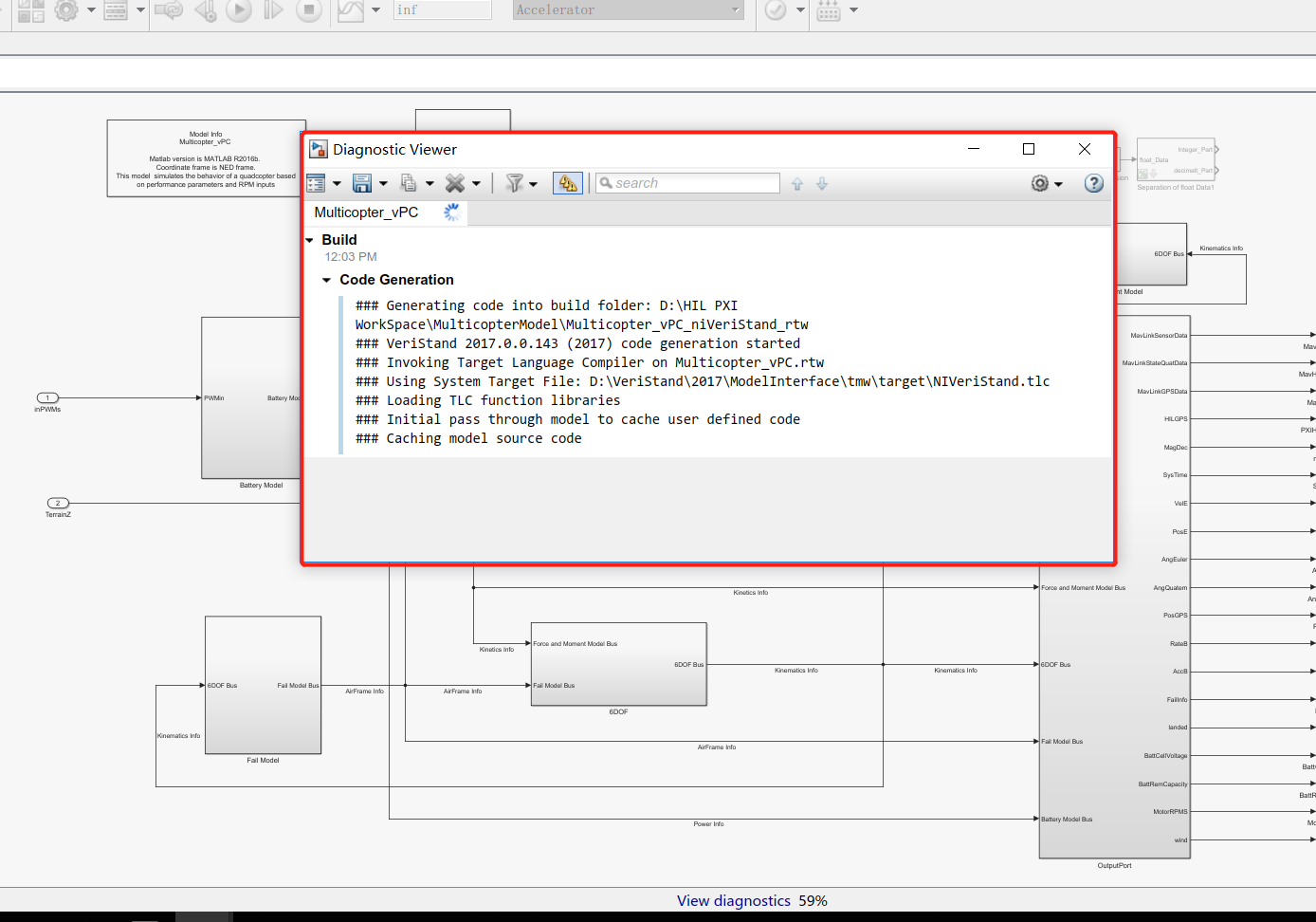
可以点开模型下面的蓝色提示查看编译进度,如下图
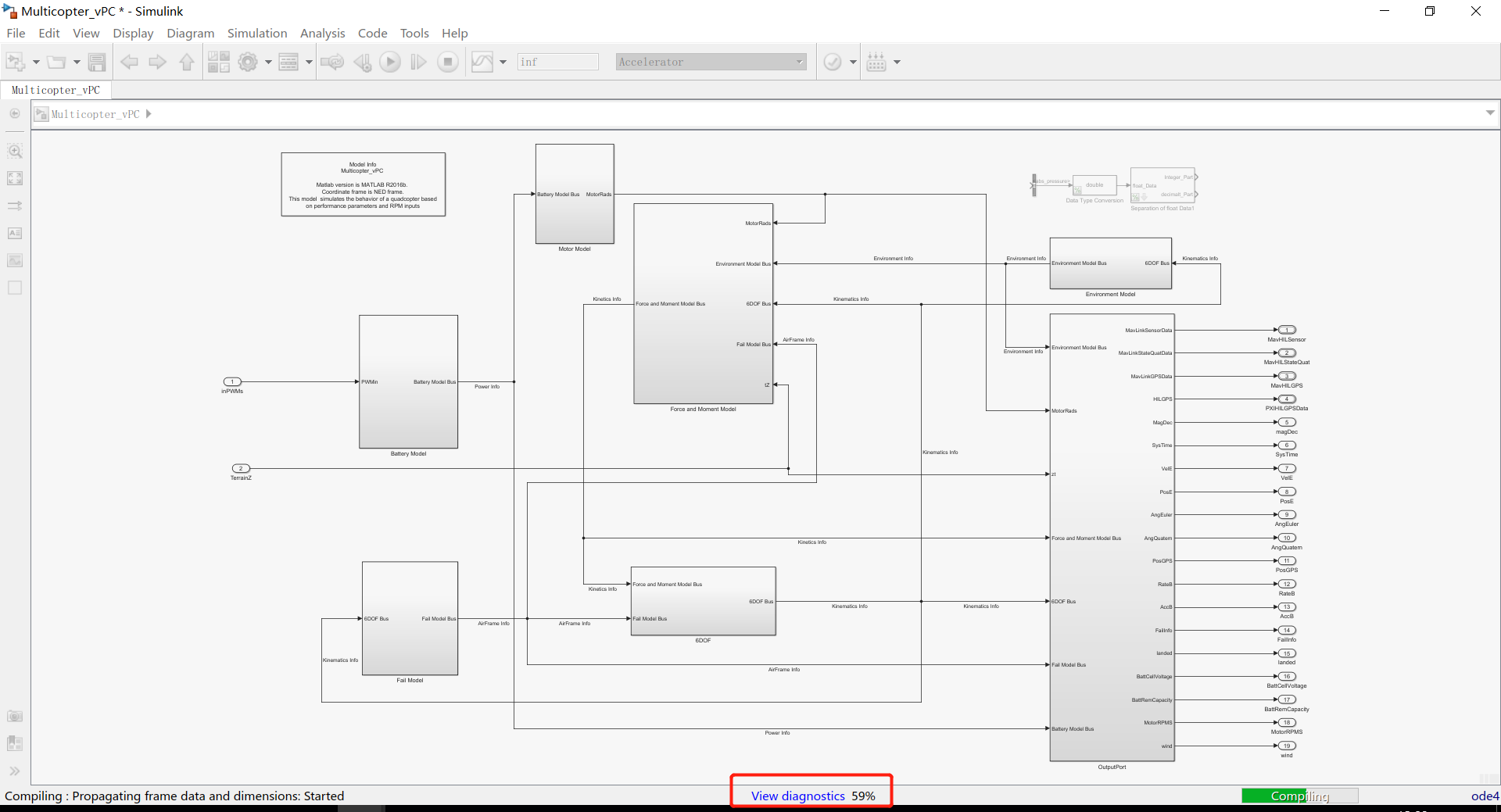
下图中就是编译进度:
如果编译失败,其中的错误也会在里面显示,可以根据错误细节解决问题
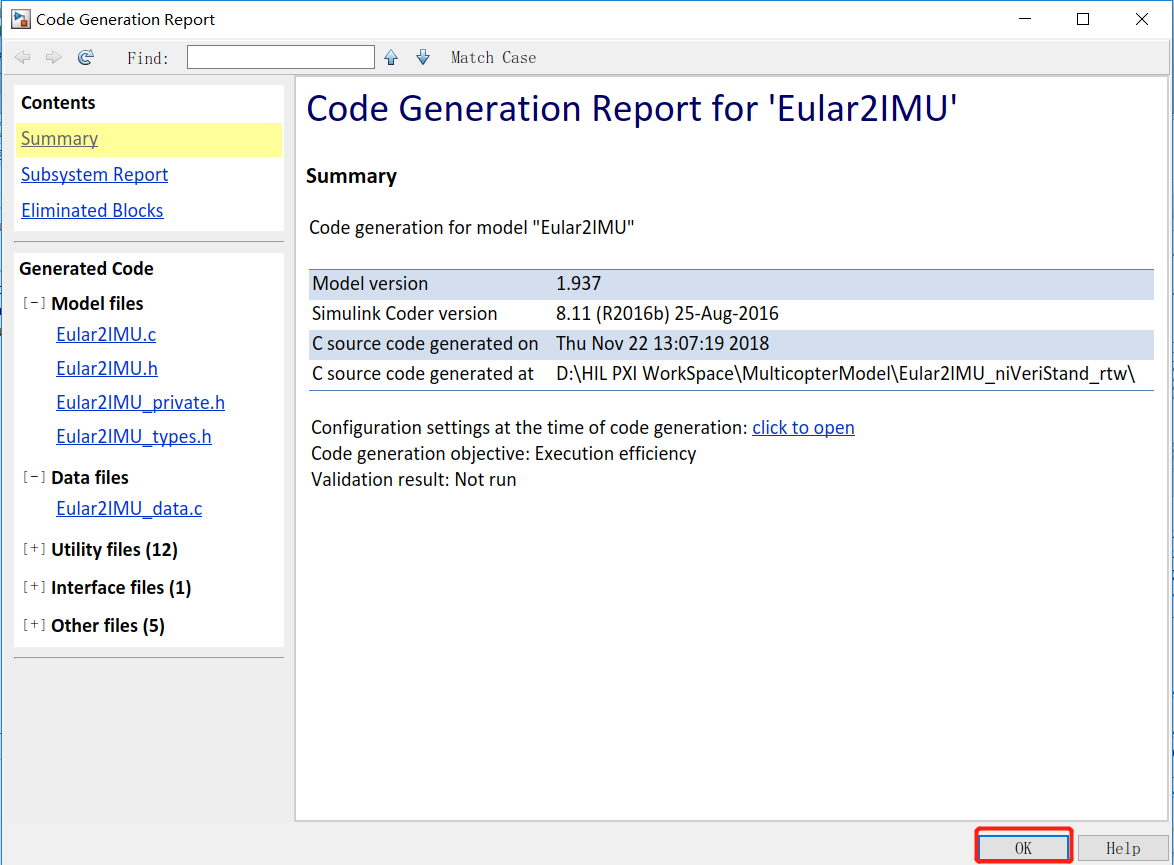
编译完成后,会弹出编译报告(也可以在设置中关闭,建议开启)
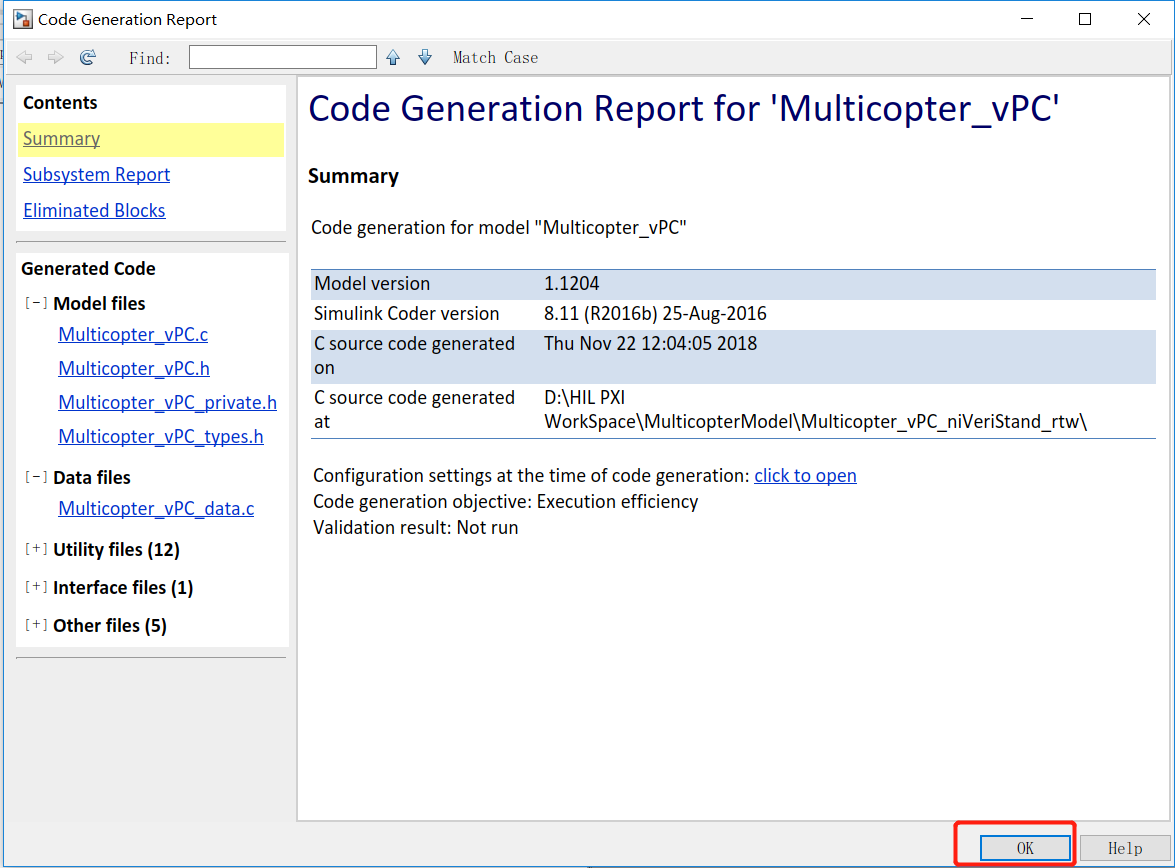
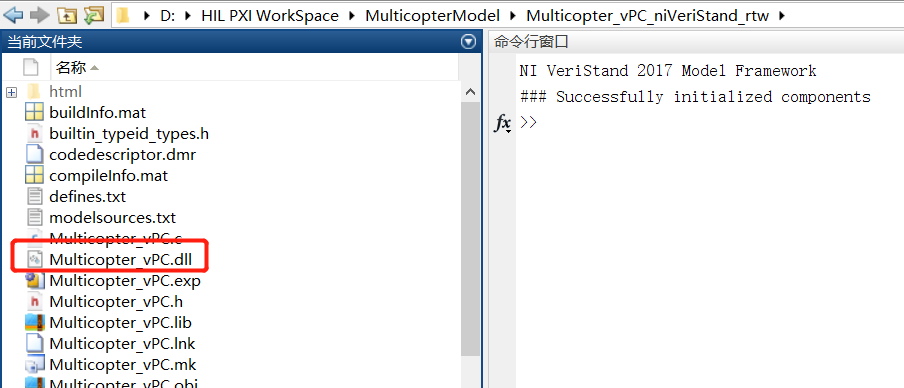
关闭报告后,查看Maltab资源管理器中出现了新生成的文件夹,如下图,里面就包含了生成的
*.dll文件,双击进入该文件夹: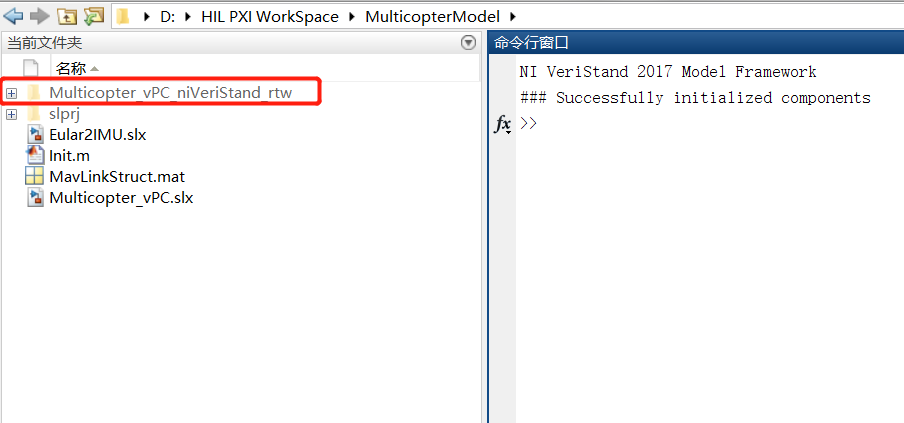
下图中标出的就是生成的模型
-
回到上一级目录,找到另外一个模型文件
Eular2IMU.slx(执行校准模型),如下图,执行类似上面的操作,编译生成模型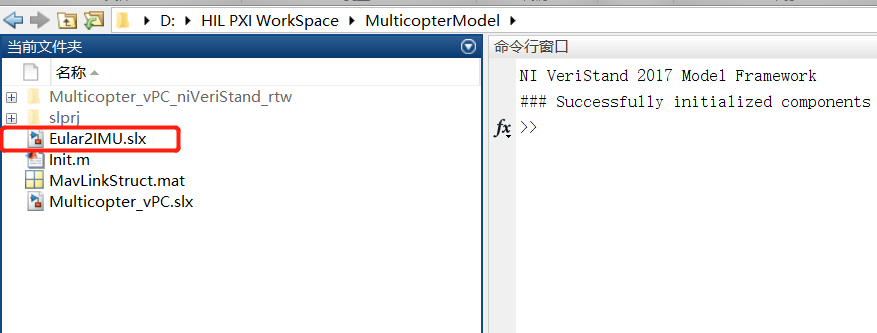
-
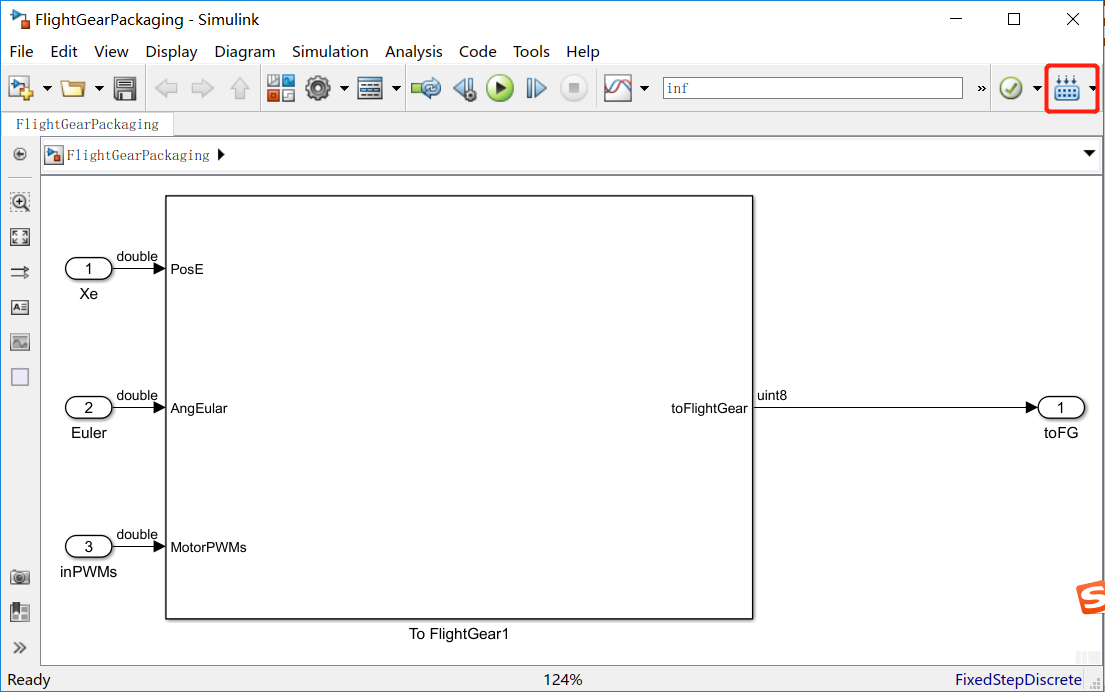
然后在进入之前解压的另外一个文件夹
FlightGearPackaging。如下图:
类似的,检查模型设置,需要的注意的是这个模型(FlightGear显示数据打包模型)的步长是
0.01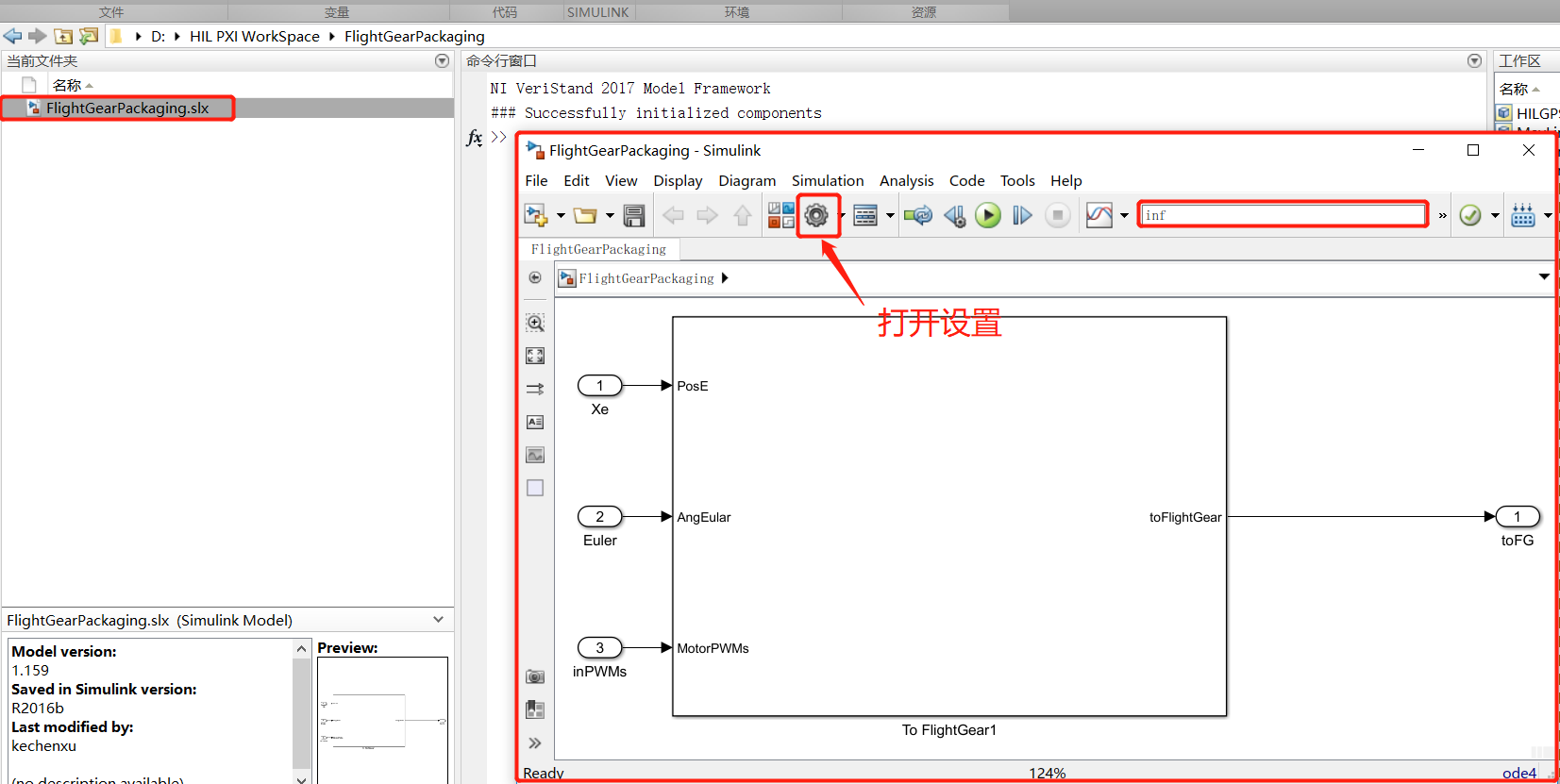
点击编译:
编译成功后,依然是在生成的文件夹中(见下图)找到对应的
.dll文件。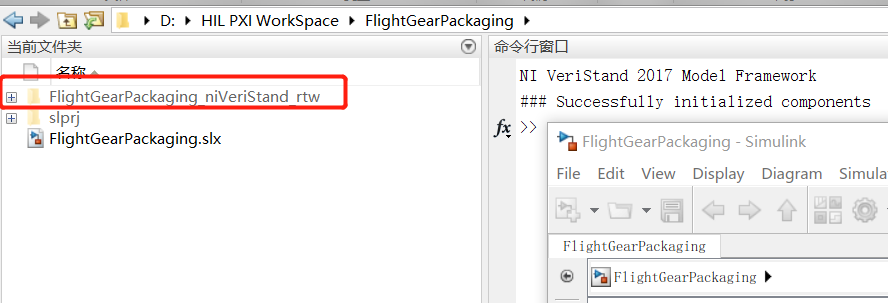
至此,三个模型都已经编译完成。
模型的仿真步长实际是可以修改的:
- 仿真步长过短,仿真平台无法按照指定时间完成。仿真平台执行一次模型所需的时间与该平台CPU运算能力有关。按照模型默认设置的步长,设定的周期是200us,仿真平台测试的可以达到的最短周期在100us以上。所以默认使用的仿真步长是0.0002s。
- 对于FlightGear显示数据打包模型的步长不建议设置太短,会增加仿真平台的负担,对于单纯的显示功能也没有必要。建议不要小于0.01
4.3 Labview2017 项目文件配置使用
4.3.1 安装适用于PXI机箱的软件
在开始使用平台进行仿真之前,需要为PXI机箱安装软件。可能已经提前安装好了,就不需要安装了。
- 用网线将PXI机箱与局域网连接,这里需要用到PXI机箱上的1号网口(机箱上有标记,一看便知),将网线插入即可,打开PXI机箱电源,稍等片刻,等它启动完成。
- 在之后的使用过程中,都要保持PXI机箱处于局域网中。
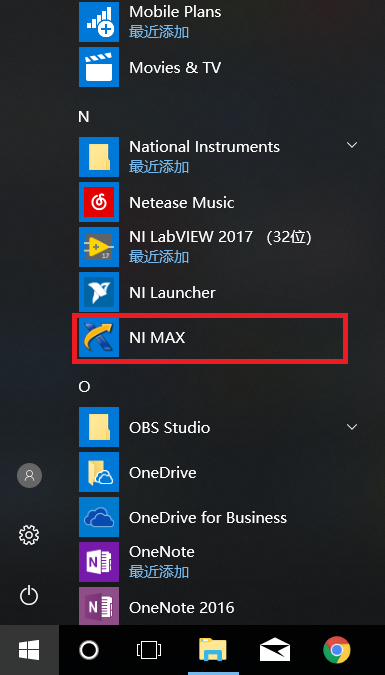
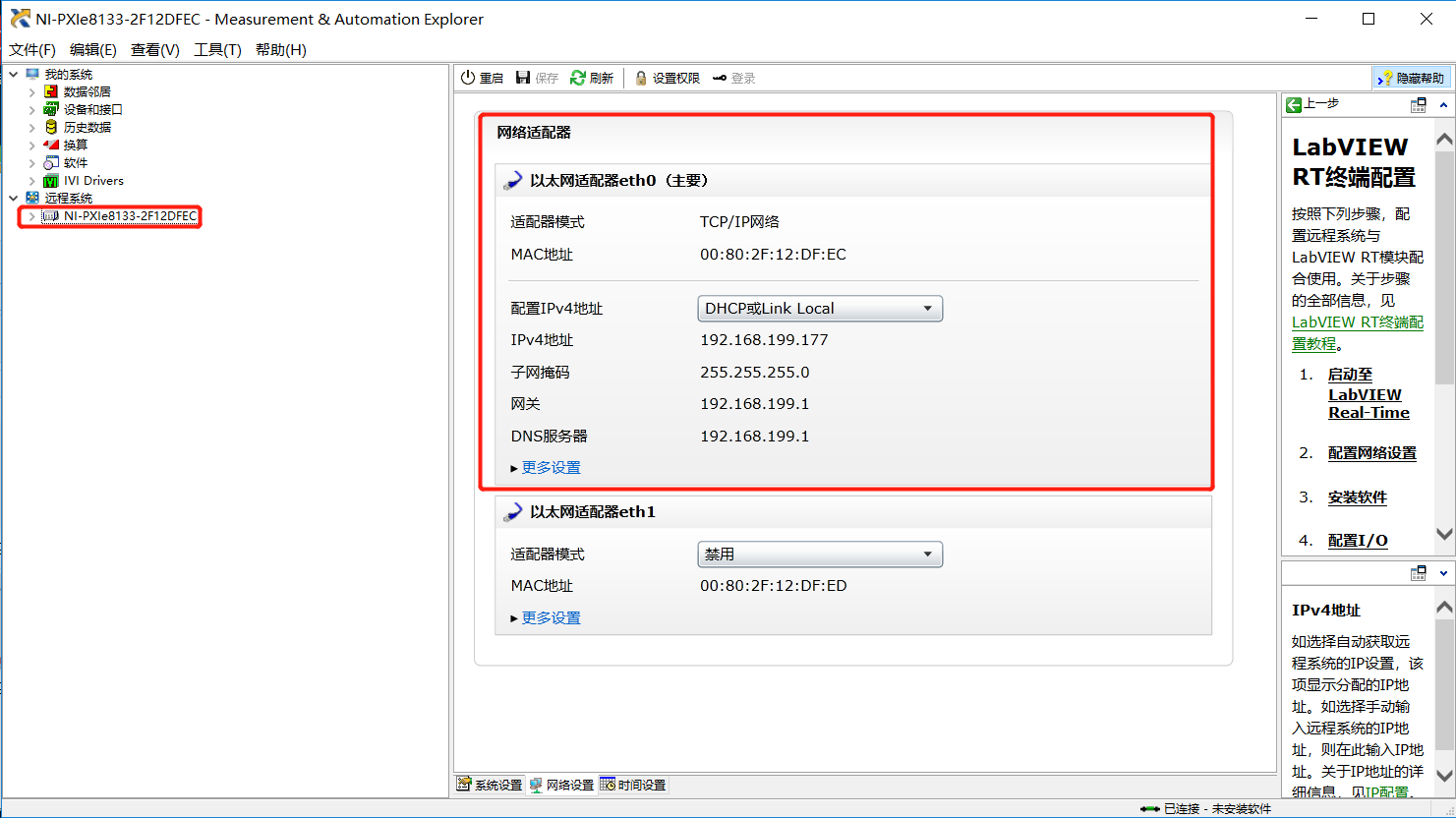
首先到开始菜单中找到下图中的软件 NI MAX:打开

打开软件后,点开远程系统。检索过后,就会出现,目标机箱
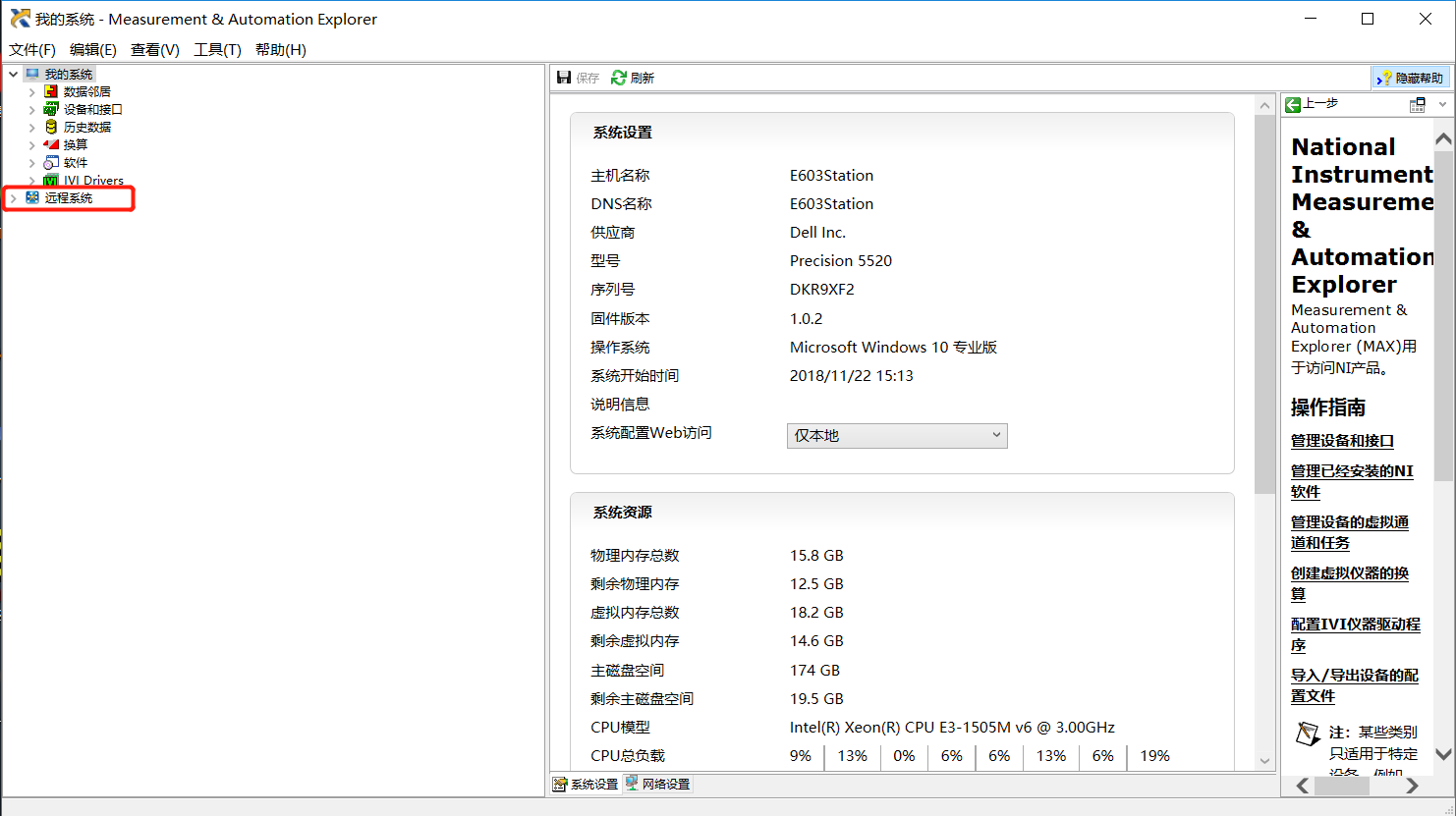
如果打开软件之后,没有出现上图中
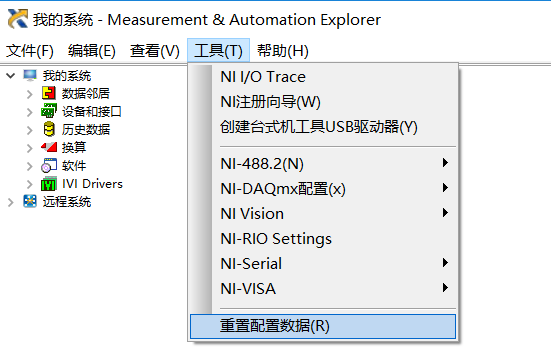
远程系统那么可以尝试如下操作:工具$\rightarrow$重置配置数据
然后会出现要求重启等,对话框。按照提示操作即可。重启后再次打开该软件,问题应该可以得到修复。
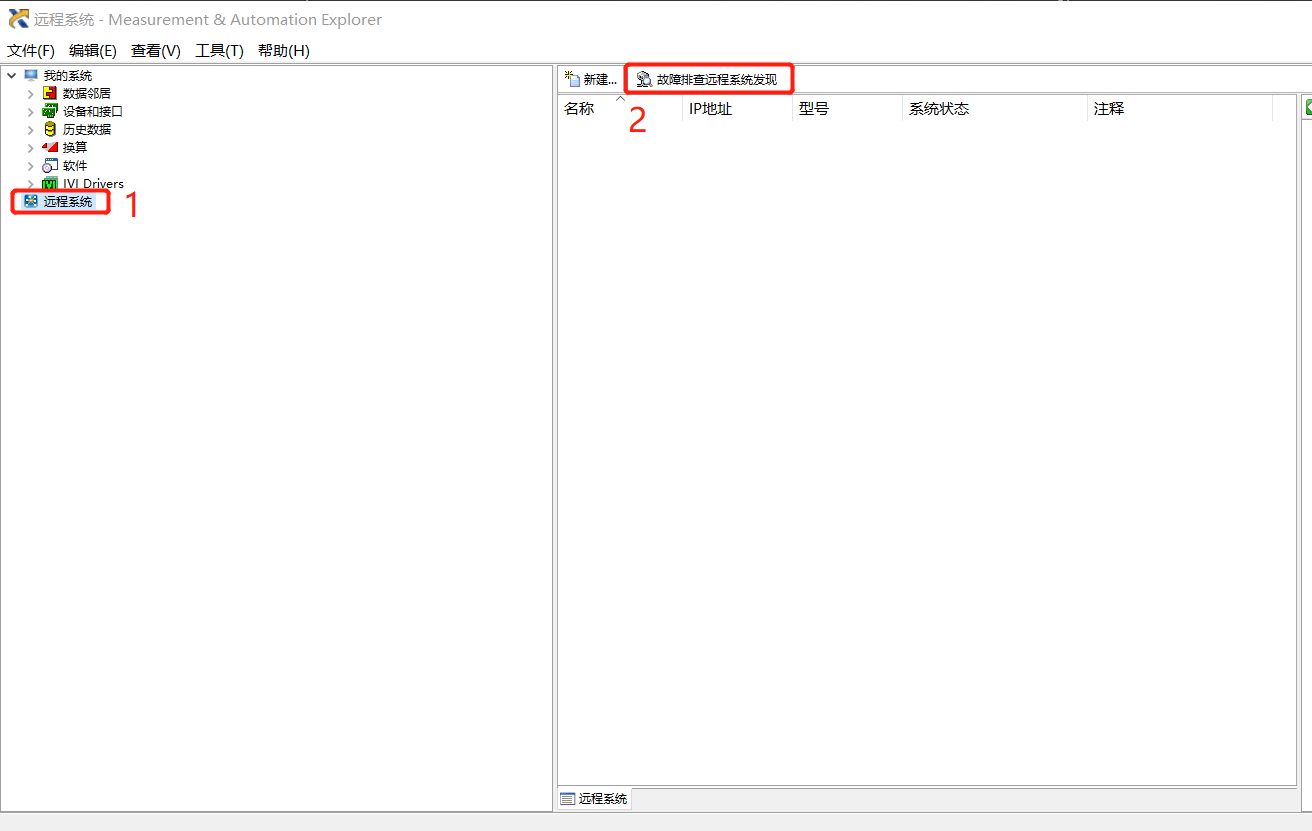
有时点开
远程系统后,并没有出现目标机箱,或者远程系统下面什么都没有。这通常是防火墙造成的问题。如有,按照下面的方法解决。如下图,选择远程系统后,到右侧上点击
故障排查远程系统发现:
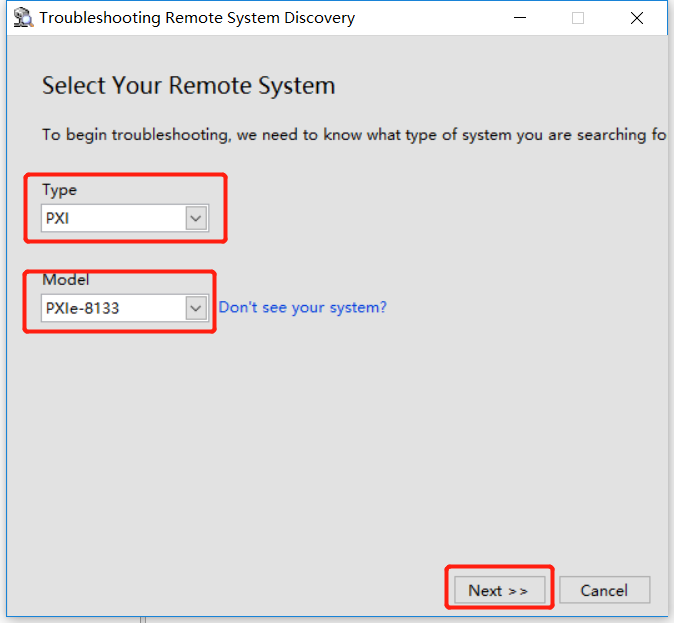
然后会出现下图,设置成下图所示的选项,点击下一步:
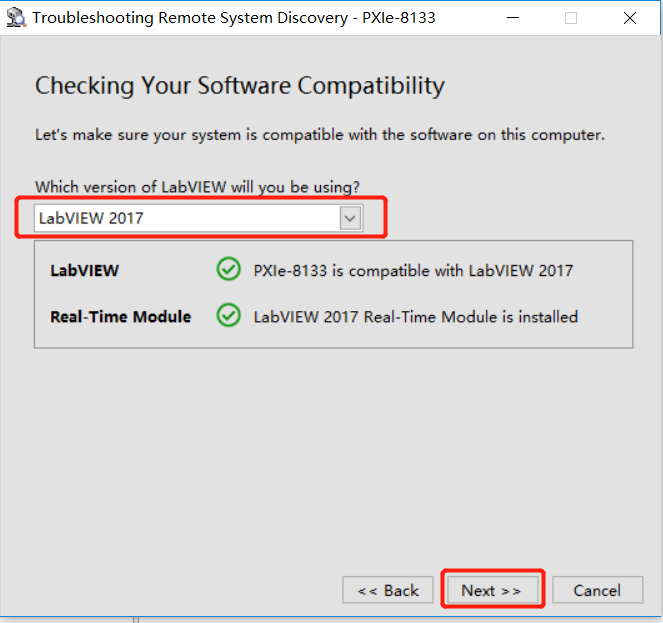
由于使用的是2017版本,所以按照下图选择Labview2017,之后点击下一步:
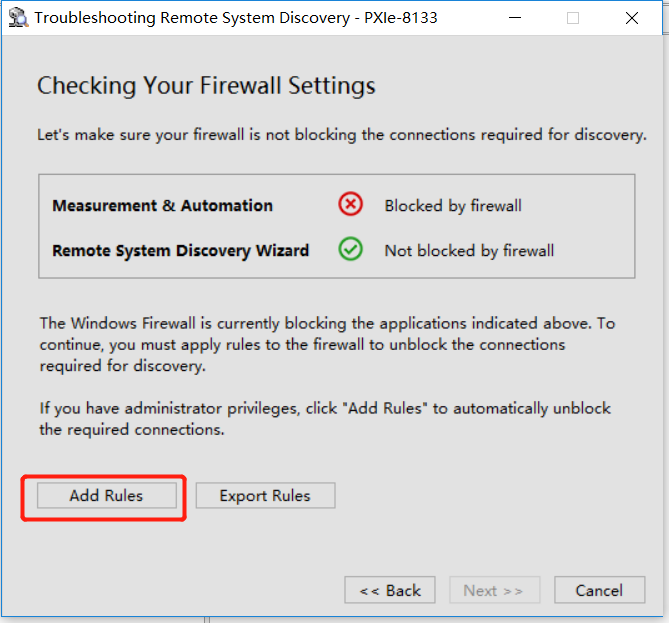
然后会看到下图,图中也显示该软件被防火墙阻挡,点击图中的
Add Rules添加规则,然后会弹出用户账户控制询问是否通过防火墙,选择是即可(其他时间弹出的对话框同样要选择是,不然会被防火墙阻挡,出现问题)
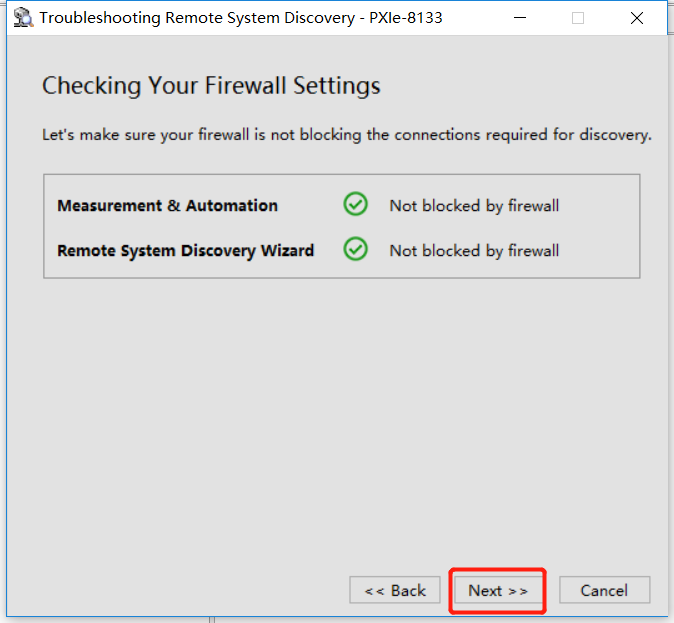
允许通过防火墙后,变成下图的样子,点击下一步:
接着会自动搜索,搜索完成后会出现下图的目标终端,如下图,然后点击下一步,之后就可以在远程系统下看到目标终端了,也就是我们的仿真计算机。
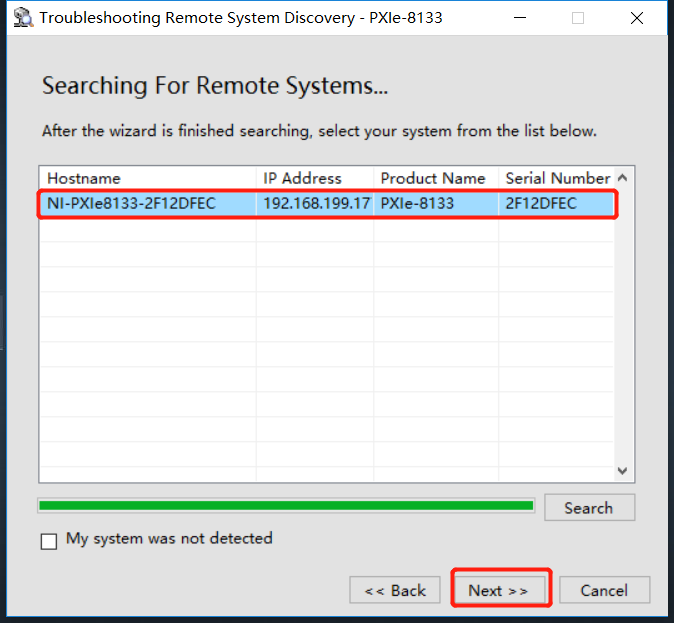
下图中是搜索到的仿真计算机,如下图。点击左侧红色框中远程(局域网)计算机,看到右侧有机箱在局域网中的IP地址等信息。
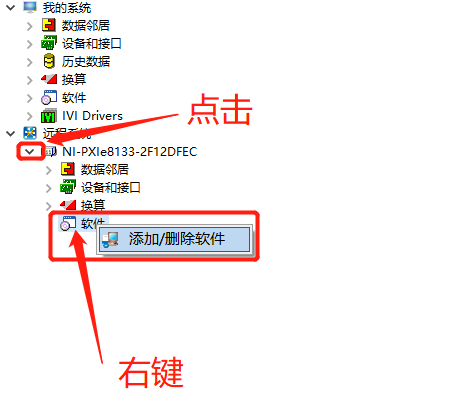
之后点开远程计算机,选择软件右键选择添加删除软件,
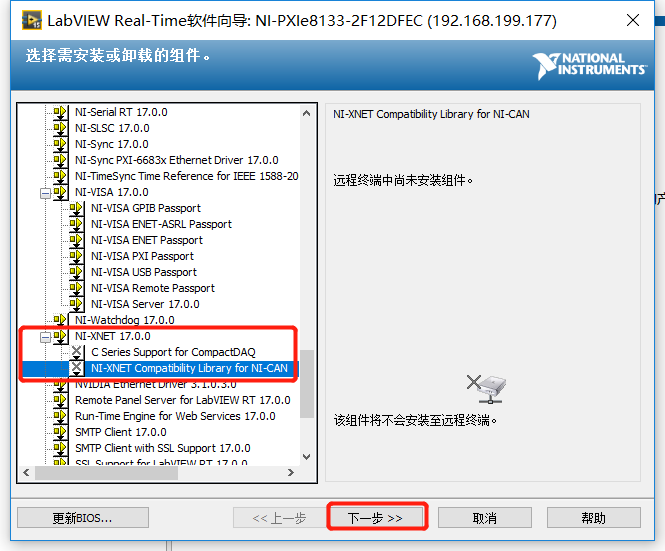
在弹出的界面中,选择要安装的软件(软件列表名字前面小图标上单击,可看到安装选项,选择安装即可),除了下图中标出的软件不选,其他的全部选择安装,之后点击下一步
如果你完全熟悉这些软件的用途,也可以只选择必要的软件安装。
再次点击下一步:

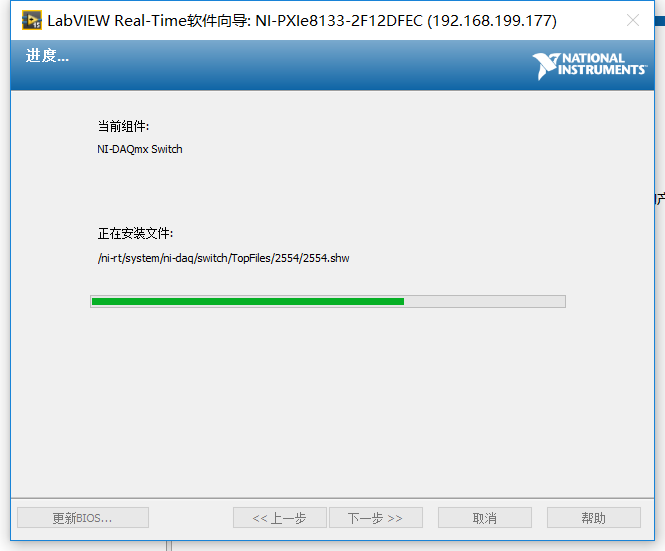
等待安装完成:
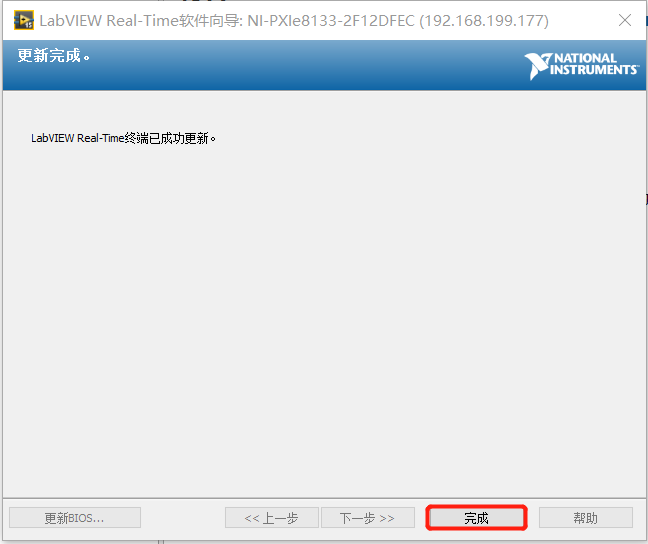
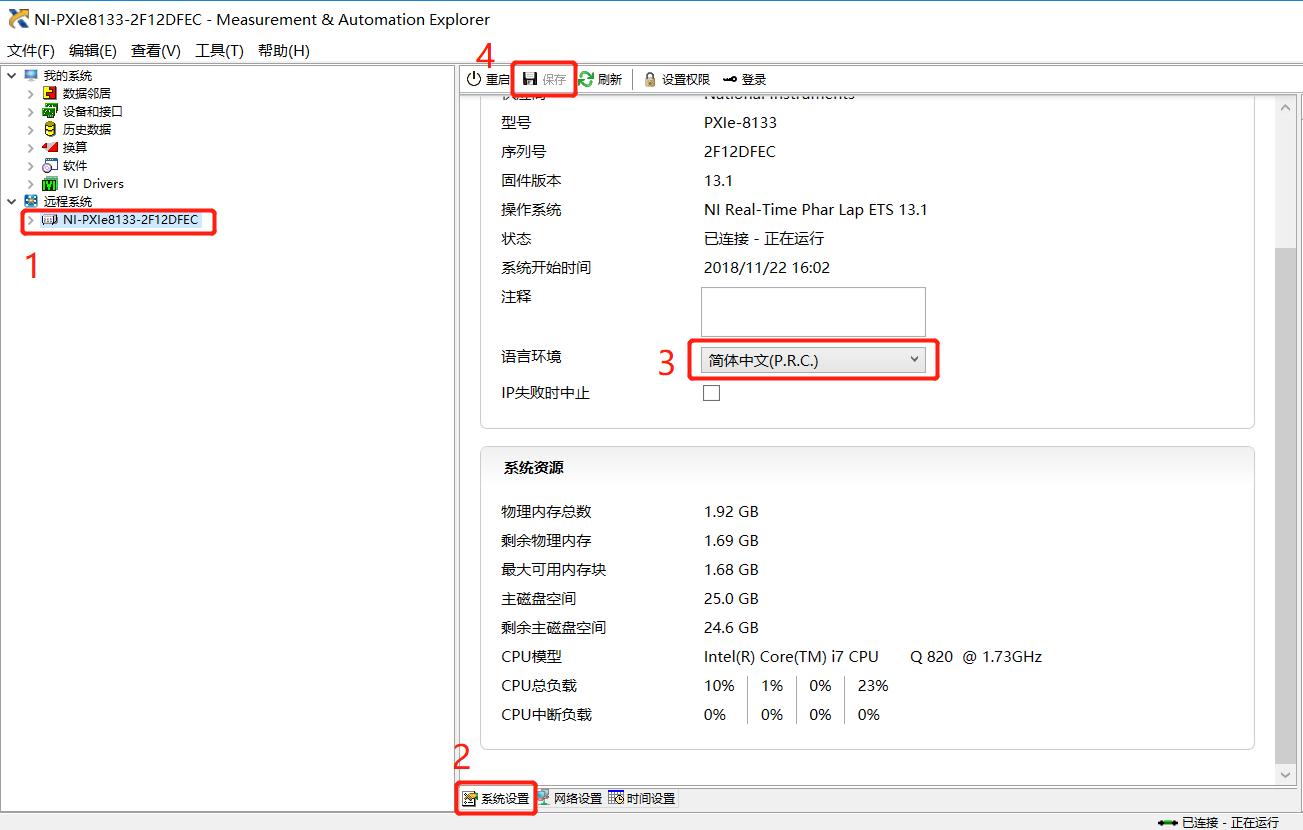
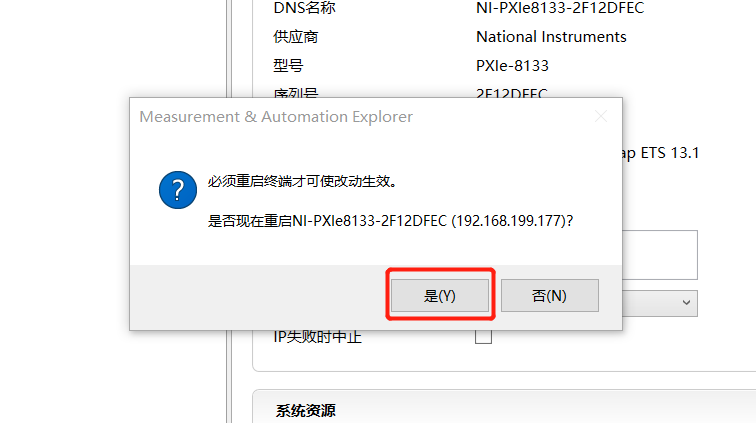
点击完成后,退回到软件主界面,按照下图标记步骤操作,点击保存后确认是否重启,选择是:
等待重启完成,至此机箱内的软件安装完成。完成后将NI MAX关闭即可。
4.3.2 仿真平台软件介绍
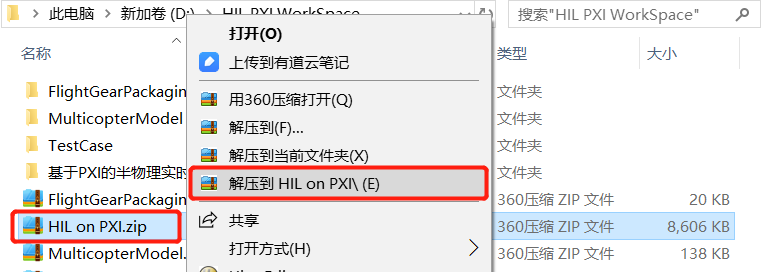
进入文件夹 项目文件,找到 HIL on PXI.zip,如下图:
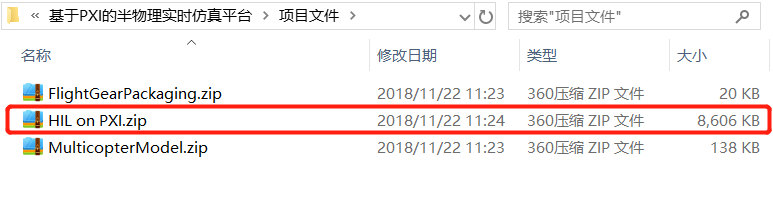
将其复制到其他路径中,路径中不要有中文名,解压
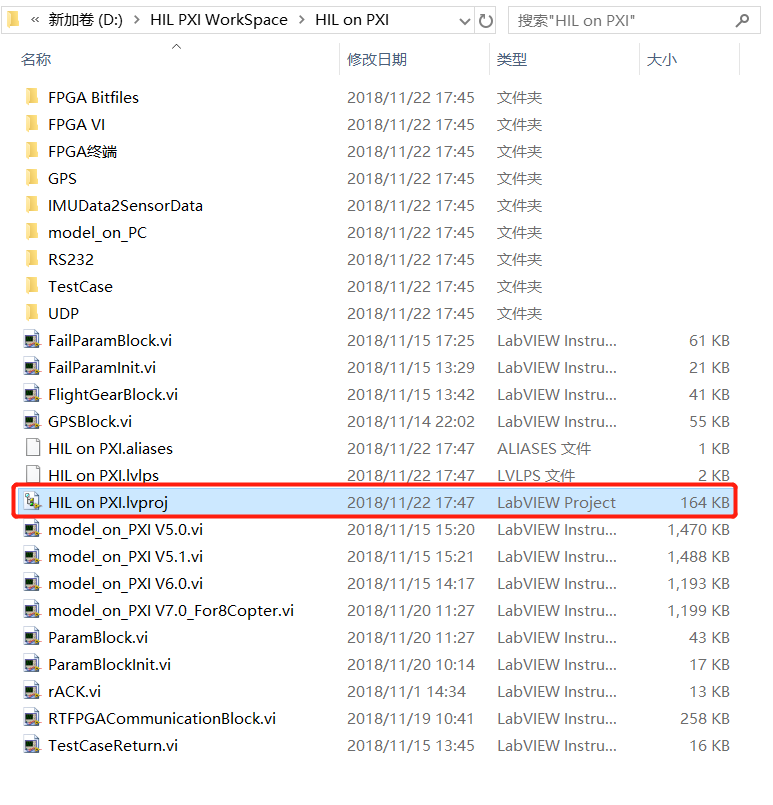
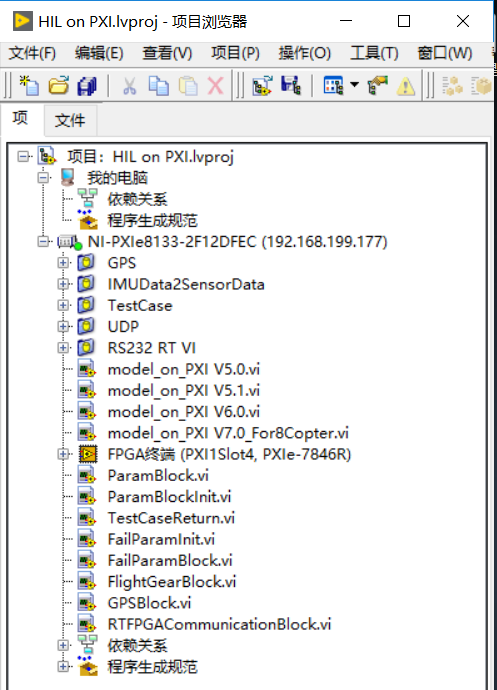
进入解压后的文件夹,找到下图中的 HIL on PXI.lvproj,双击打开:
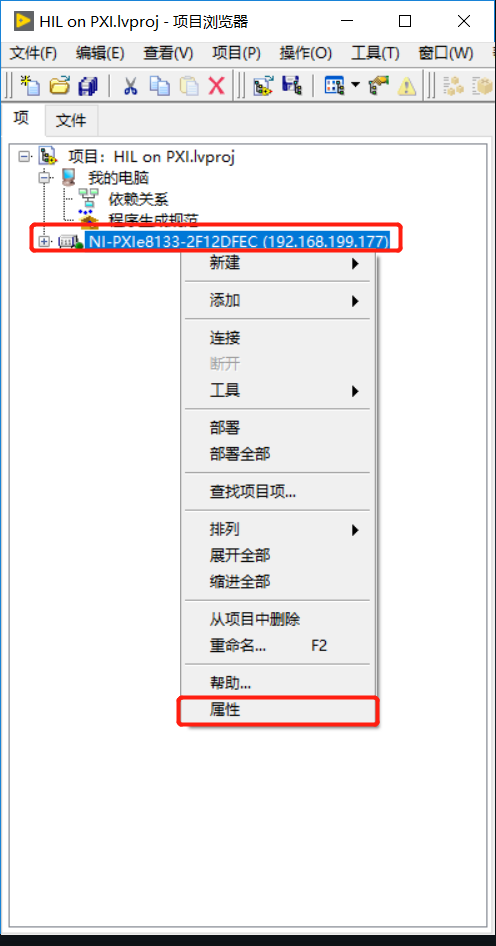
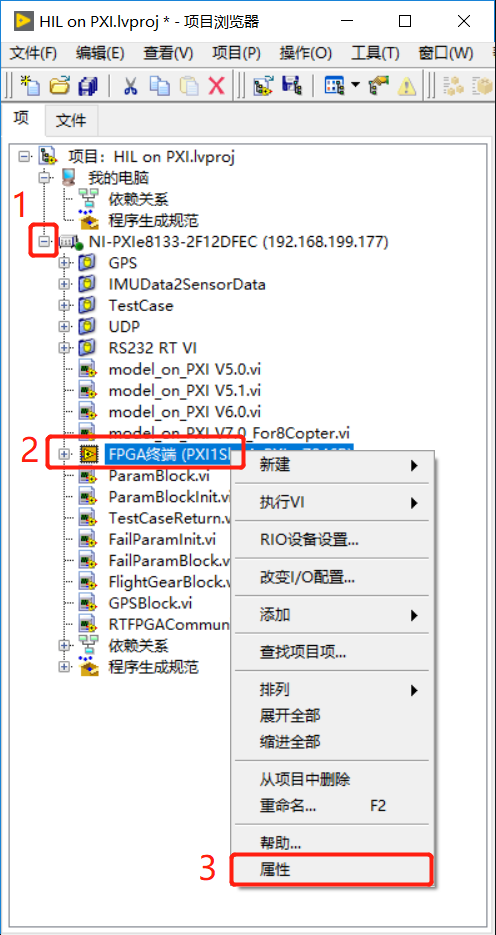
打开过程中,出现需要确认的对话框一律点确认通过(用户账户控制、防火墙等),打开后出现下图所示,项目浏览器,并按照下图所示,打开 属性:
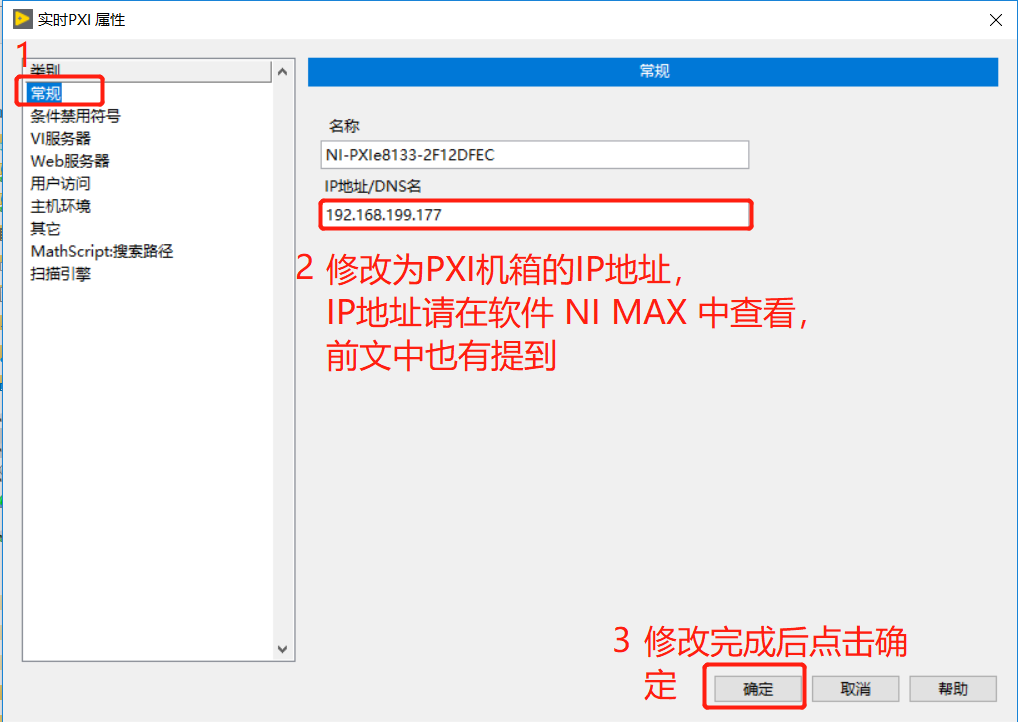
打开后,单击窗口左侧 常规。,然后确认窗口右侧的IP地址是目前PXI机箱在当前局域网中的地址,确认之后点确定关闭即可。
PXI机箱在局域网中的地址,在上文
4.3.1 安装适用于PXI机箱的软件中有介绍。
接着,按照下图打开 FPGA终端的 属性:
在刚打开的窗口左侧单击 常规,确认窗口右侧 资源名称与实际是对应的。如果有疑问请继续往下看:
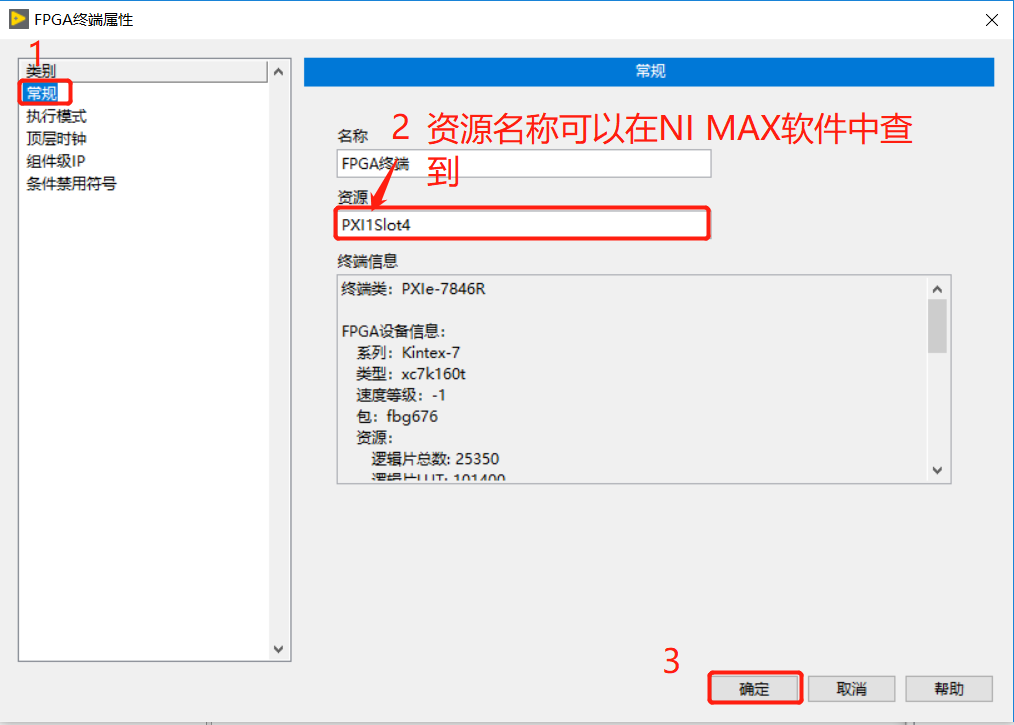
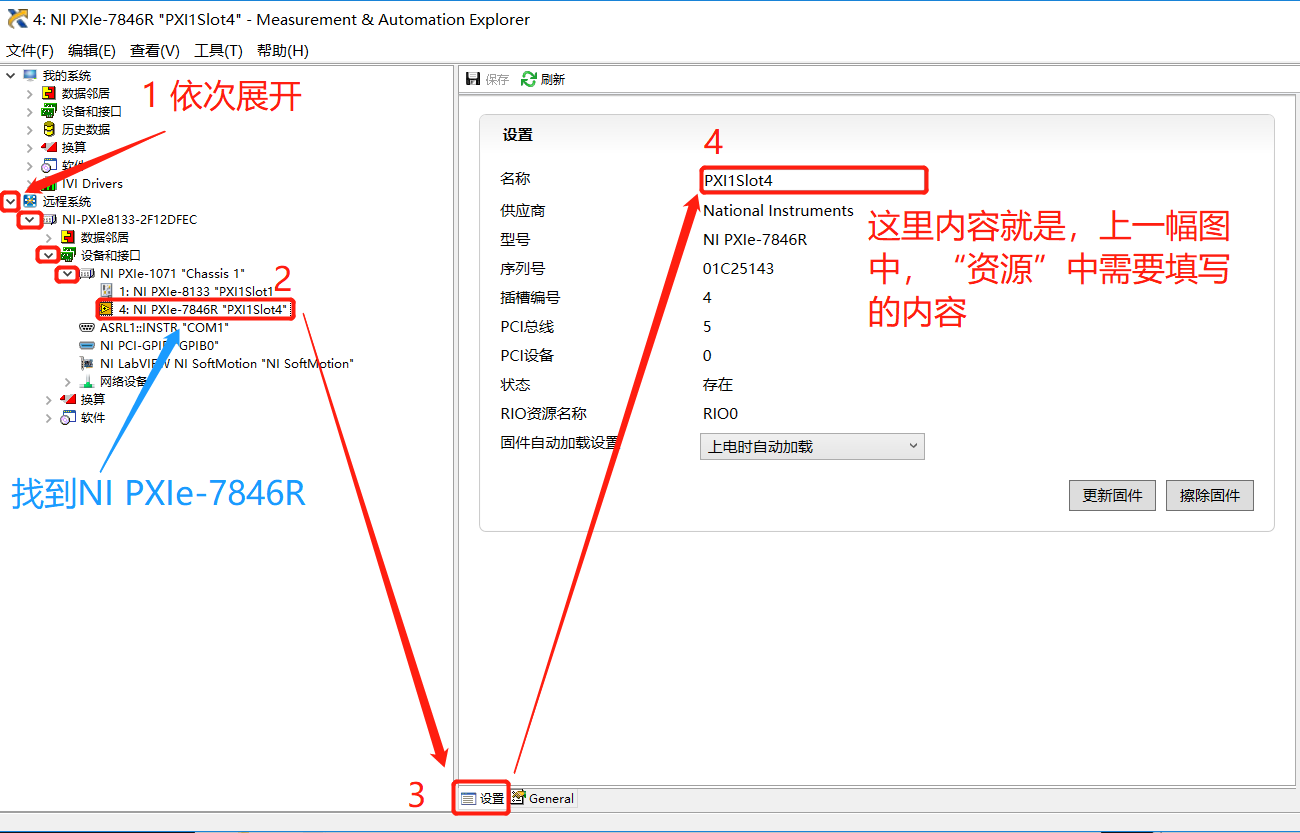
接着上图,如何查看上图中 资源一项的内容?如下图,打开 NI MAX软件(不知道从哪里找这个软件请看前文)按照下图指示操作,就可以看到上图中 资源一栏需要填写的内容。
回到项目浏览器中,按照下图操作:
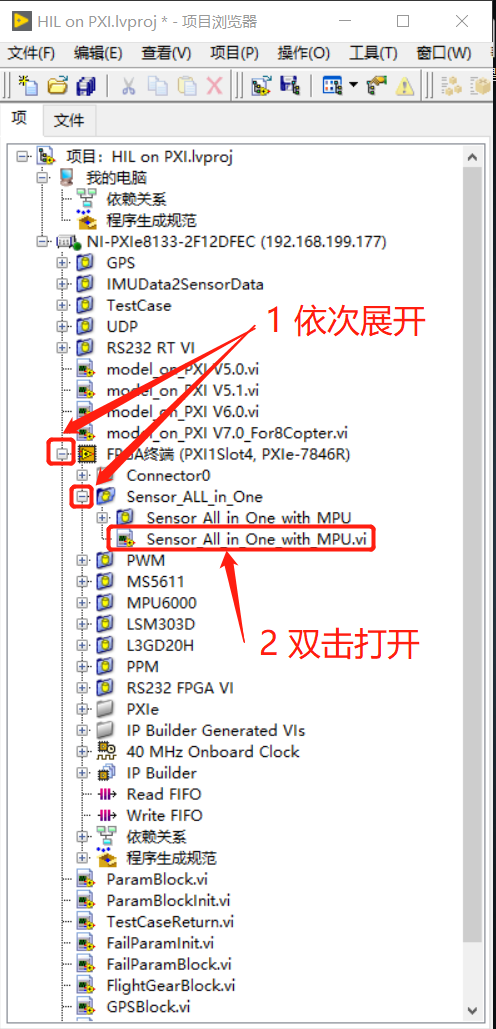
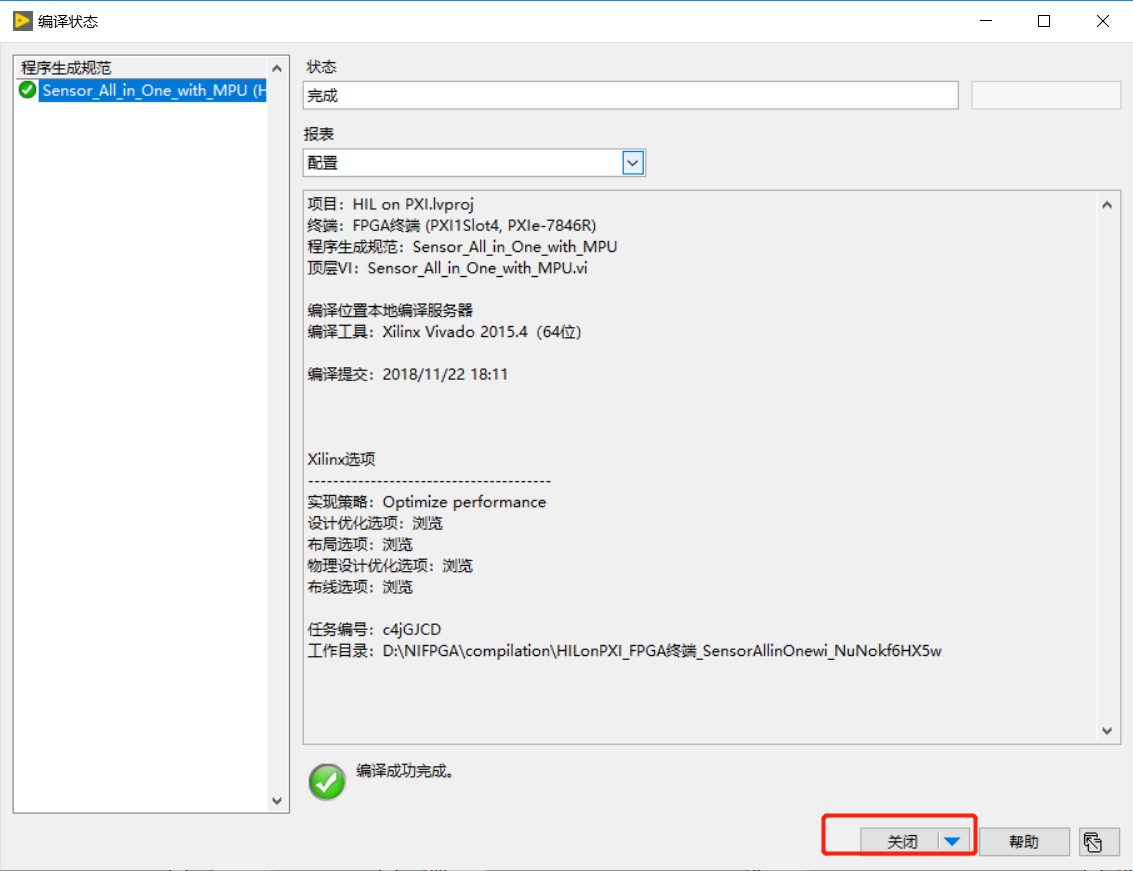
下图,这里打开的就是FPGA中用来模拟传感器、串口、PWM、PPM的程序。按照下图点击运行,尝试运行(确认此时机箱已经打开,并且正确接入局域网中)
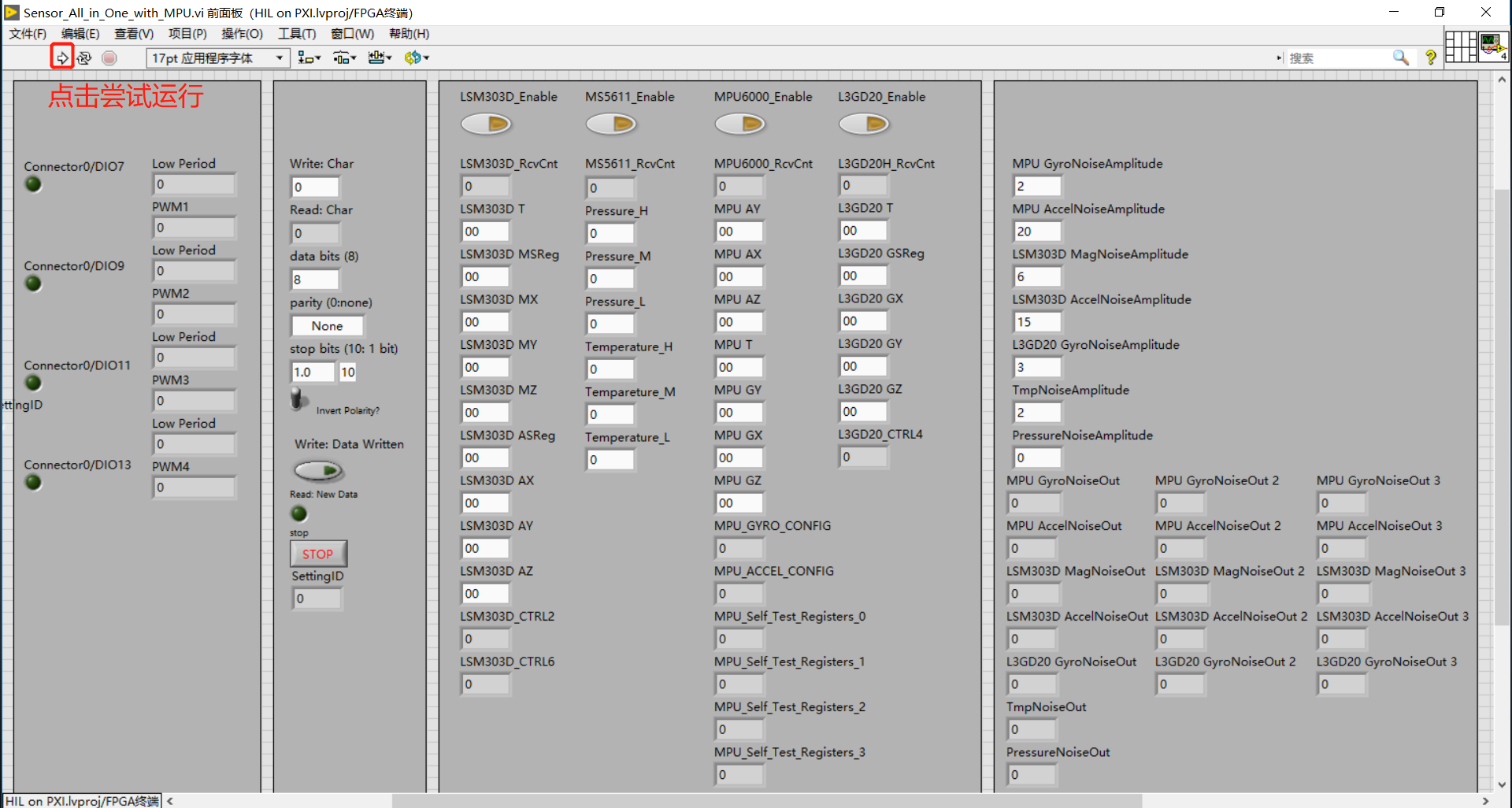
这时通常需要重新编译一次,期间弹出的任何对话框,都要点击确认或者保存(总之不要点取消)。
最后会进入编译界面,编译时间会比较长至少10分钟。
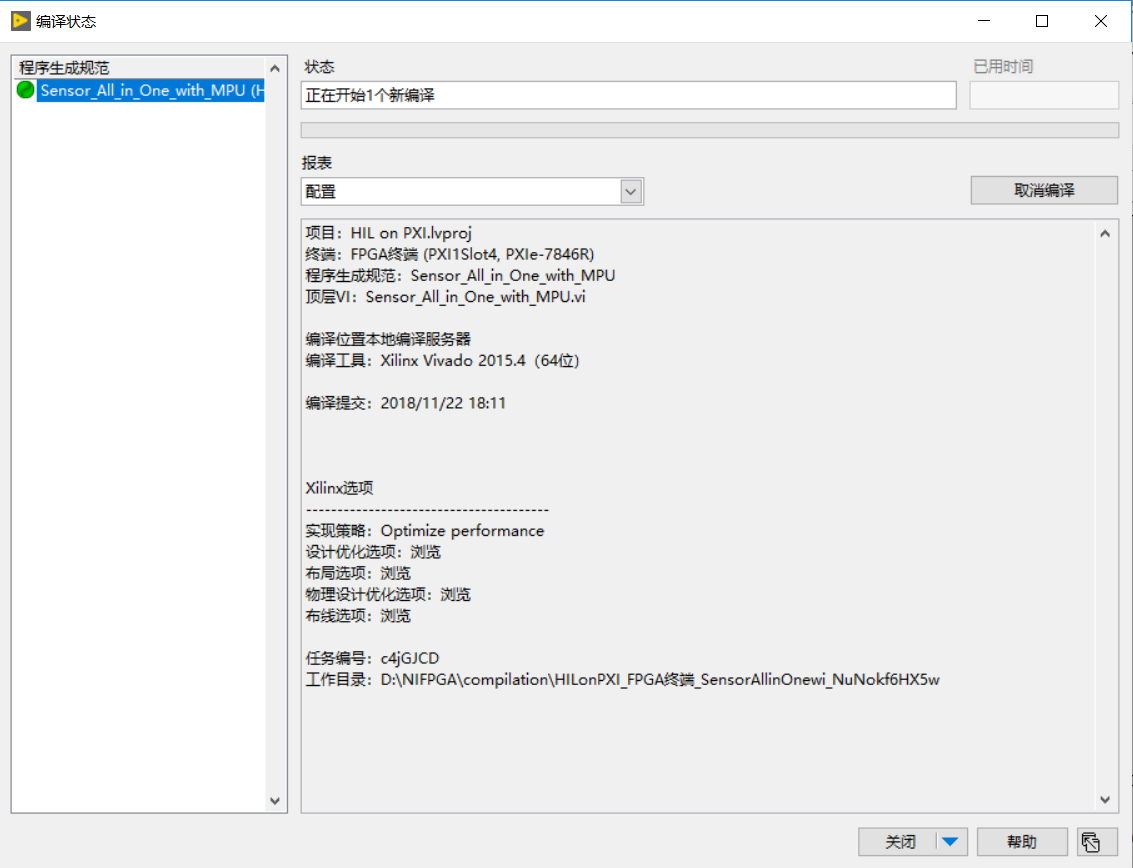
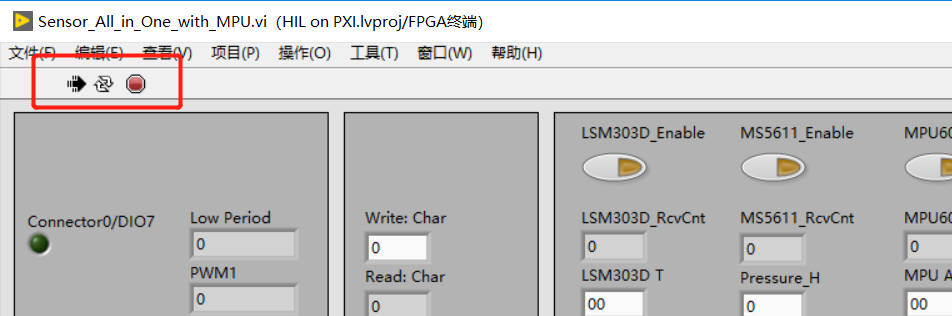
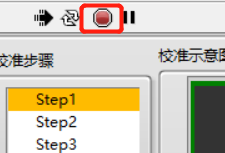
编译完成后,之前的程序框图会自动弹出,并自动运行,如下图:
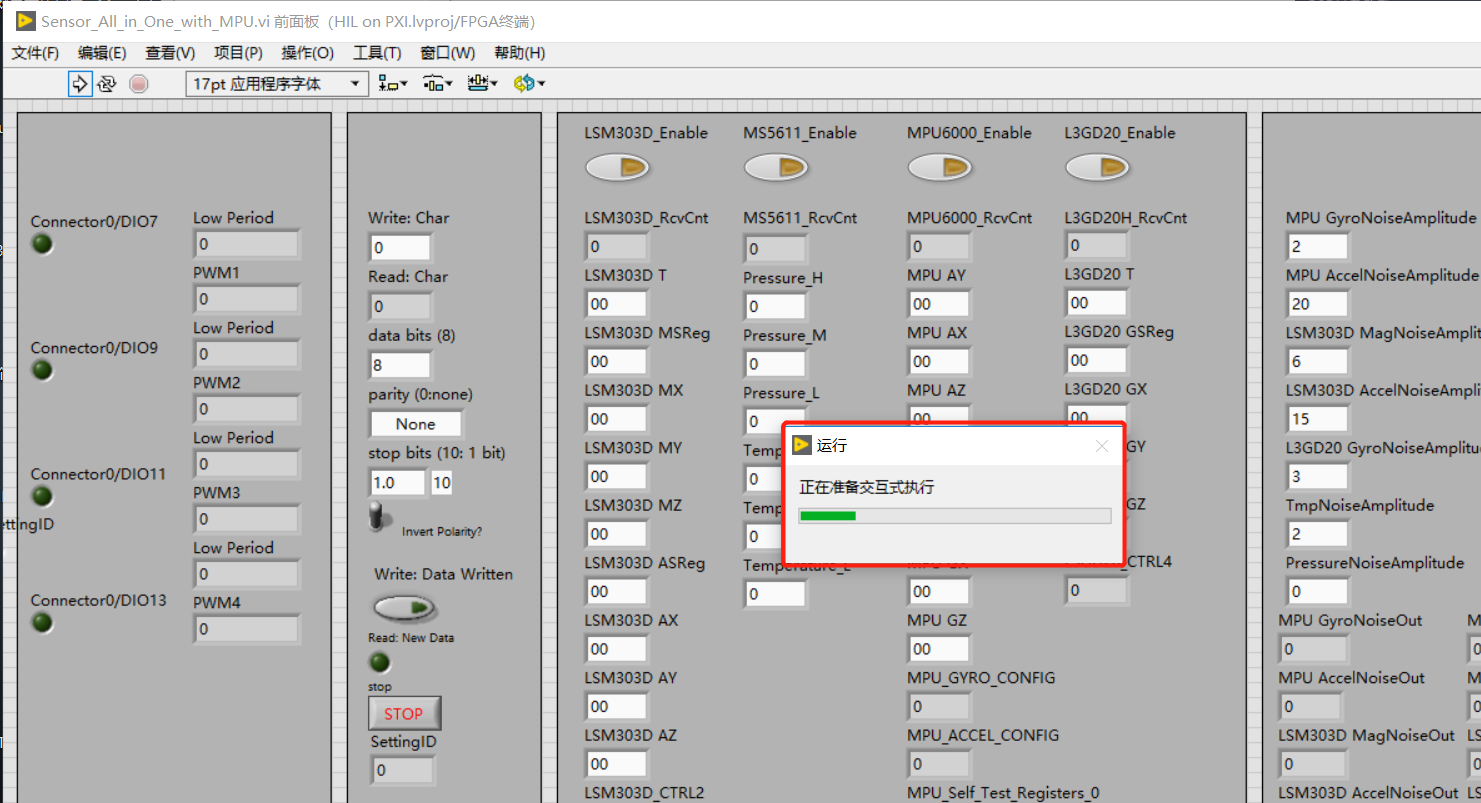
单机下图中的红色按钮,停止运行。然后关闭该程序。
该FPGA程序,实际使用中不需要直接操作,而是通过其他VI程序调用实现的,这里只是确认该程序是否需要重新编译,且可以运行。
再将刚才的编译窗口关闭,如下图:
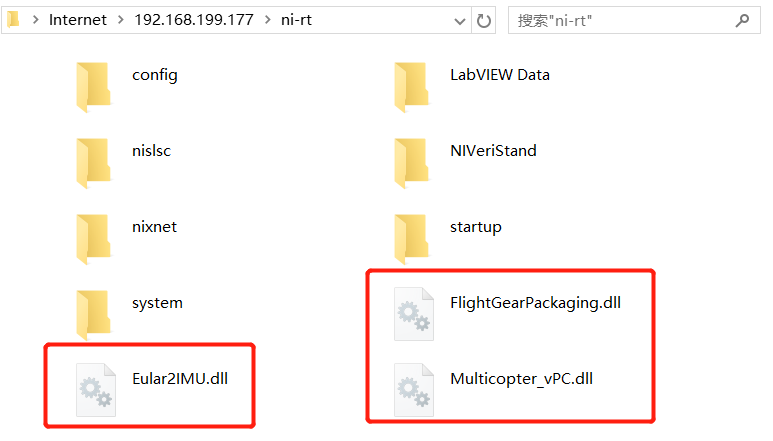
接下来要介绍运行仿真平台的主程序。但是在这之前,我们需要将之前编译好的三个Simulink模型(见上文中 4.2 Matlab/Simulink模型介绍与编译)也就是 *.dll文件,存放到正确的位置。如下图,打开 NI MAX软件,按照下图打开 文件传输:
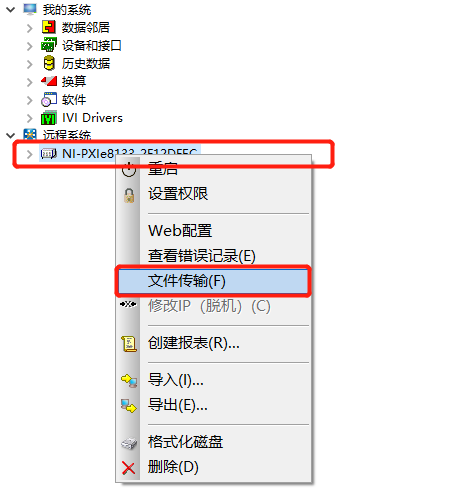
在刚打开的文件夹中,进入文件夹 ni-rt,如下图:
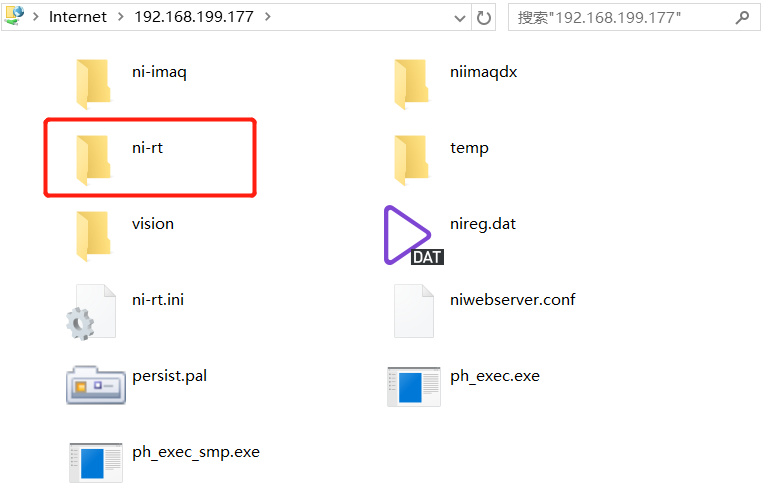
将4.2节中编译好的三个模型文件复制到这个文件夹中,复制完成后关闭即可,如下图:
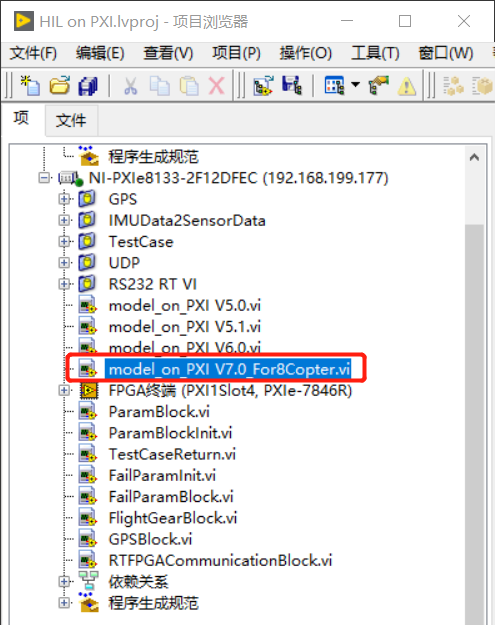
放置好模型文件后,视线回到项目浏览器中,双击打开下图中所示文件,这个就是整个仿真平台的 主程序:
主程序的名字、版本在后面可能会有变化,请以实际为准。后面会起一个一看便知的文件名。
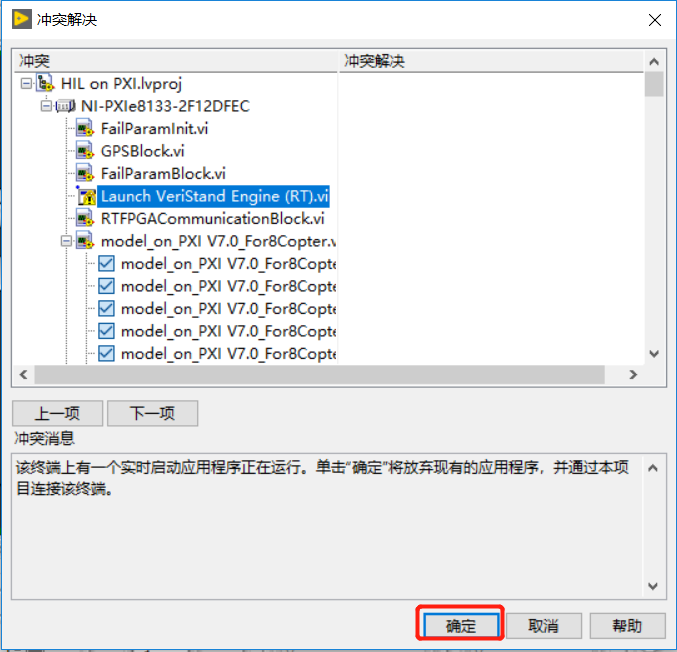
打开后就看到下图中的程序主界面,单机下图中红框标记的运行按钮(白色的箭头)。运行
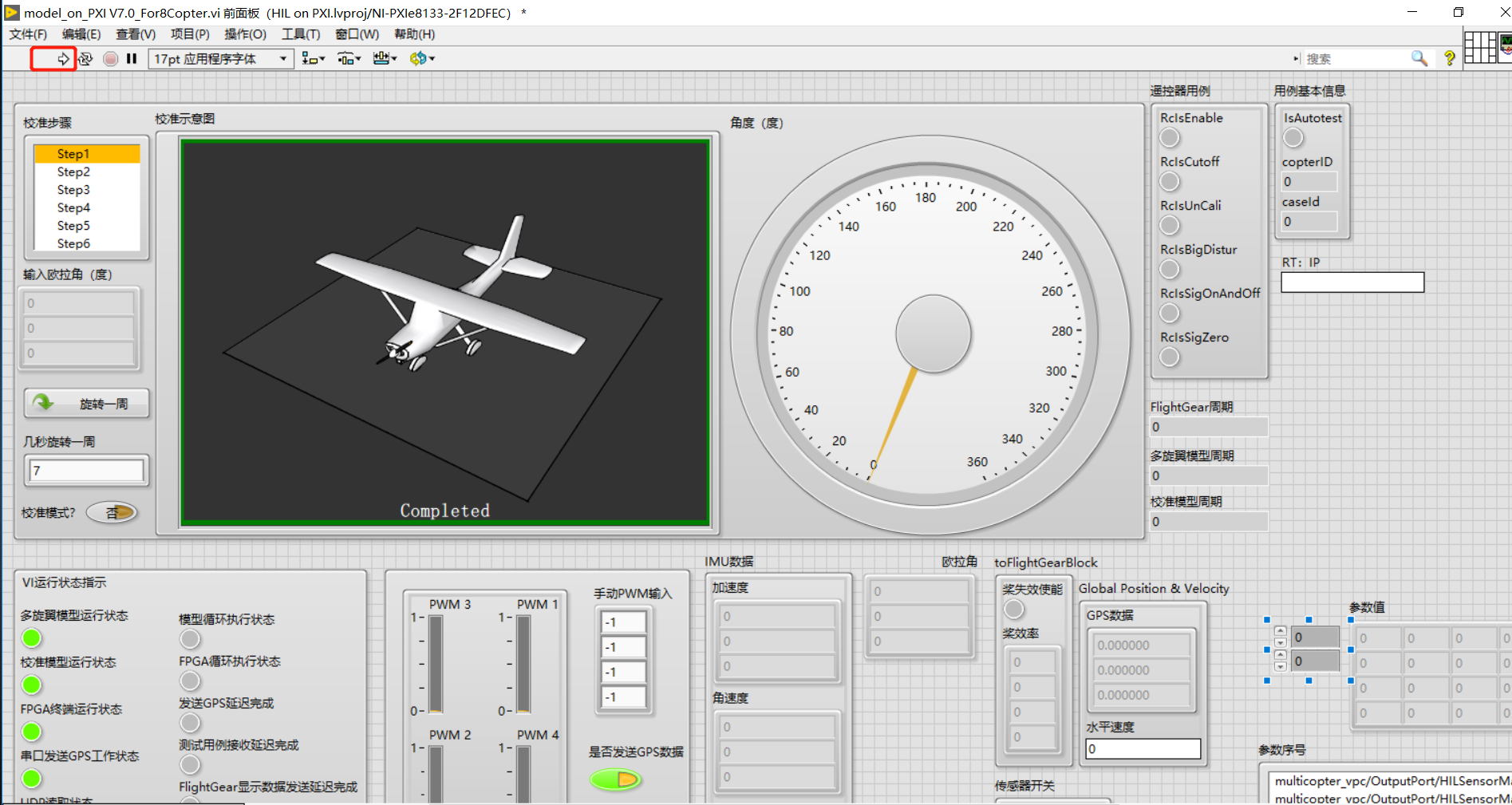
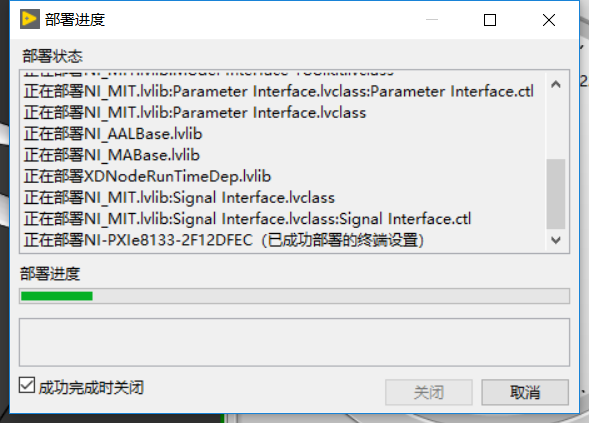
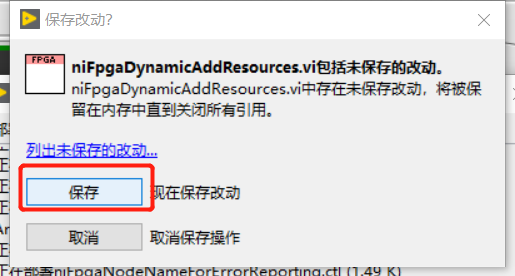
第一次点击运行后,可能会弹出很多对话框,一律点确定一类的按钮,如下图
由于这是用来开发的项目,Labview会检测到一些变化,然后提示是否保存。实际上并没有什么变化,所以一律点保存或者确定等。弹出的对话框可能千遍万化,这里不能穷举。
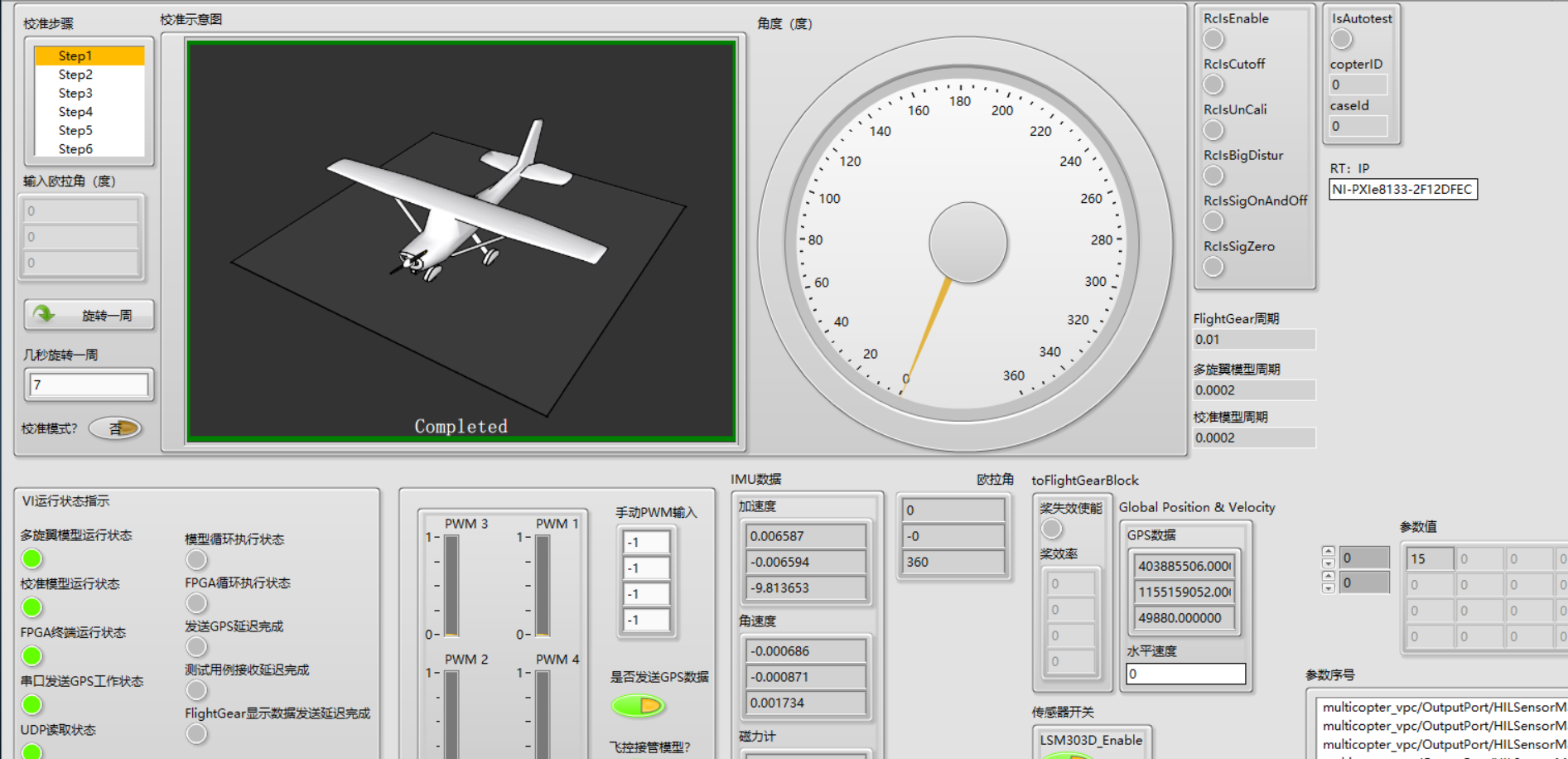
最后就可以看到运行中的仿真平台主程序了,如下图:
主程序布局后期会有变化,请以实际为准。
熟悉主界面之后,先停止该程序,见下图,之后关闭程序文件。
到这里,整个仿真平台的安装配置简单运行已经通过,接下来就是具体的使用方法了。
4.4 基本使用流程
阅读本章需要熟悉前面所有章节内容
4.4.1 飞控基本设置
对于一台全新空白的的Pixhawk飞控,通常需要顺序执行以下操作
| 刷固件 | 图示 |
|---|---|
| 刷固件 |  |
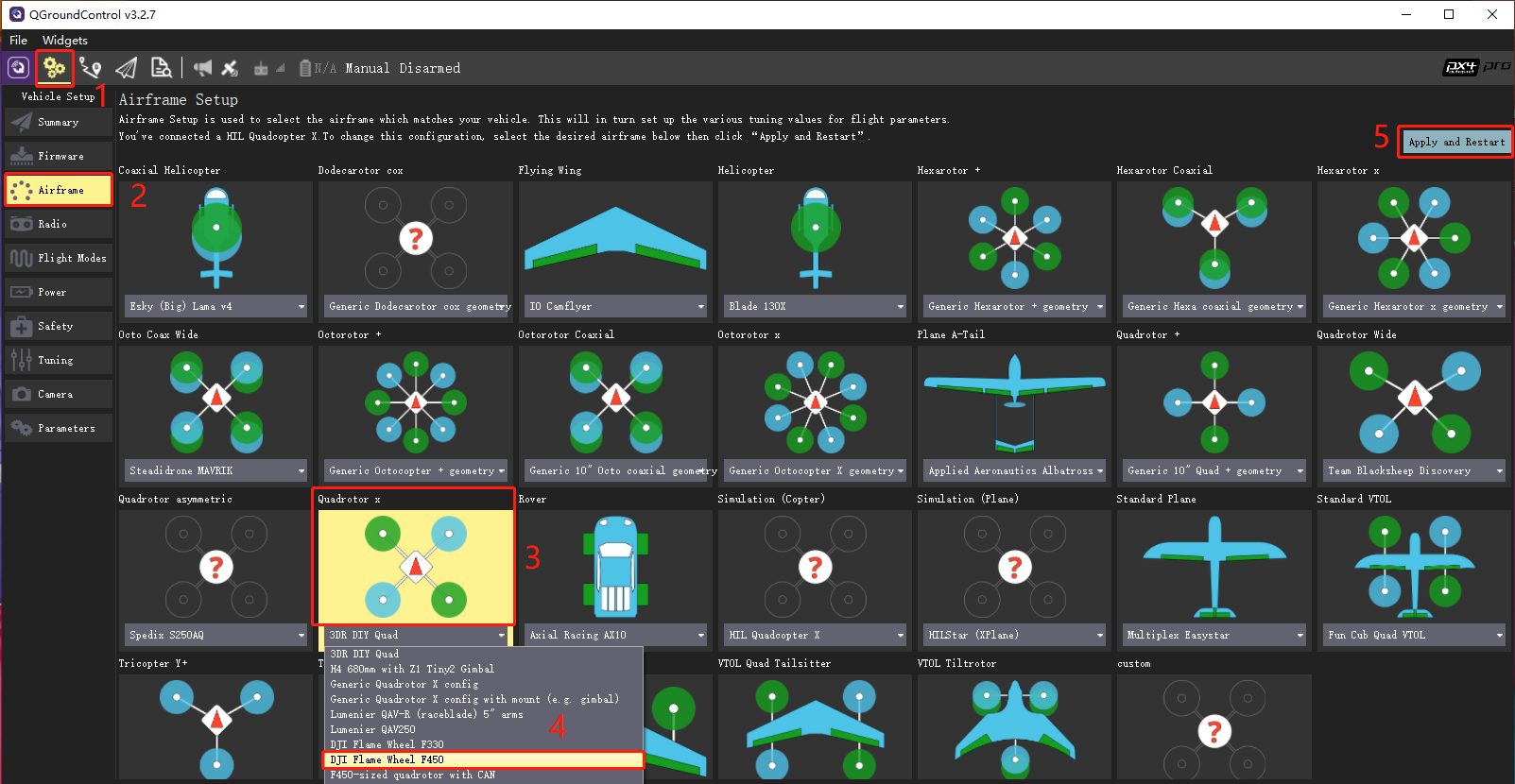
| 设置机型 |  |
| 遥控器校准 |  |
| 传感器校准 |  |
| 设置飞行模式 |  |
实际使用中需要校准传感器的情况比较多。显示红色的设置说明需要重新设置,如上传感器校准的指示图标。
本平台支持多种旋翼类型,这里以基本的X型四旋翼为例做简要说明。如下图所示按照序号操作,选择机型为DJI Flame Wheel F450之后选择右上角的Apply and Restart,待飞控重启完成后完成机型设置。也可以参照接下来提到的操作视频。
飞控无法解锁的时候根据QGC地面站的提示通常需要重新校准飞控。
关于以上的关键操作请参照文件夹 操作视频中的飞控校准.mp4。操作视频中几乎包含了除刷固件之外的所有操作演示。
本文档主要面向具有飞控背景的读者最好自身已经熟悉PX4、Pixhawk、QGC地面站。设置飞控部分并非本文重点,网上也有大量资料说明QGC地面站与Pixhawk如何使用的资料,也可以参考QGC地面站官方文档。
4.4.2 常规测试
本仿真平台用途,主要分为两类:常规测试和故障测试。故障测试分为两种,一种是手动故障测试,另一种是自动化故障测试。
准备工作:
- 确认飞控与PXI仿真计算机已经连接完好。
- 确认PXI仿真计算机和PC上位机接入同一局域网中
- 确认PC上位机,PXI仿真计算机软件都已配置完好。
第一步:打开仿真计算机电源,等待其启动完成,(类似于PC开机时间);
第二步:确认模型文件 *.dll已经放置在仿真计算机中正确的位置;
第三步:通过前面提到的启动脚本,打开FlightGear;
第四步:打开PC上位机上的Labview项目,即打开项目文件 HIL on PXI.lvproj出现项目浏览器窗口;
第五步:在项目浏览器中打开仿真平台主程序,并点击运行按钮运行仿真程序;
第六步:接通飞控电源,等待10s左右的的时间,观察仿真平台主程序主界面上的传感器工作状态指示灯是否全部闪烁或者接近常亮。如果某几个传感器出现不闪烁的状态,说明飞控与仿真计算机建立连接失败,这时请断开飞控电源,重新上电,这时可能需要重新校准飞控。如果反复出现该问题,请检查连线;
事实上,飞控每向仿真计算机发送一字节数据,指示灯都会闪烁一下,如果数据量很大就会接近常亮。如下图:

第七步:操作飞控安全开关,用遥控器解锁,或者安装地面站(地面站安装不做介绍,网上有教程),设置飞行任务等常规操作。可以在FlightGear中看到飞行状态。
执行第七步时就像正常操作真机飞控一样操作即可。包括但不限于,手动模式、定点、任务等。
4.4.3 故障测试
-
手动故障测试:
准备工作以及第一步至第六步与常规测试相同。这里省略。需要遥控器。
第七步:解锁,启动飞控,使用遥控起飞(可以切换为定点定高模式等)
第八步:打开
TestCases软件,如下图,按照图中说明操作即可将故障注入到模型中,在FlightGear中可以看到效果。图中注入的是螺旋桨的故障,也可以注入其他的故障。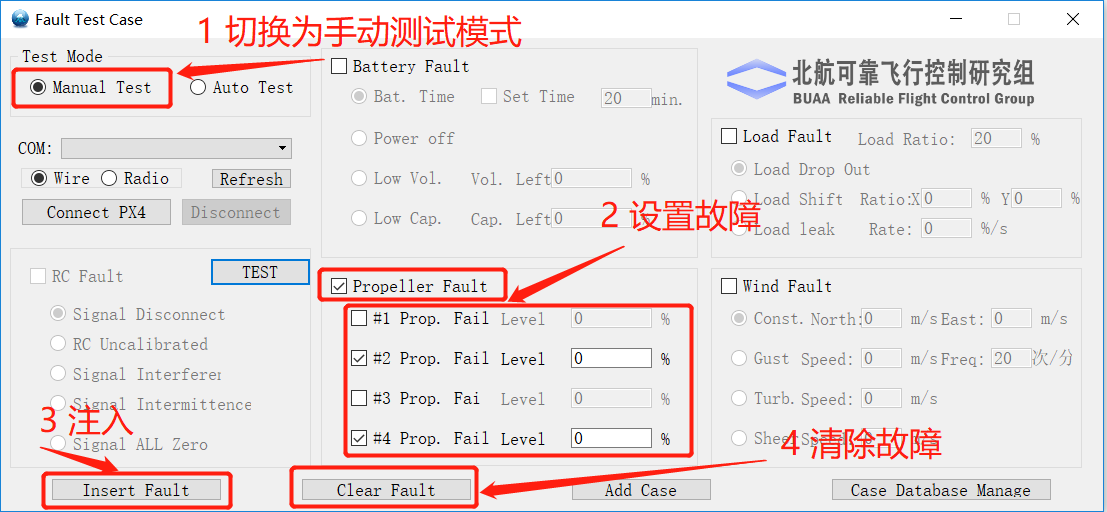
-
自动化故障测试:
注:同时参照文件夹
操作视频中的自动化测试.mp4。准备工作以及第一步至第六步与常规测试相同。但是需要注意的是,请在接通飞控电源前连接数传。数传提前配对好,一边接PC上位机,一边接飞控。不需要遥控器
第七步:打开软件
WampServer64如下图,也可以从开始菜单找到该程序,打开后在后台运行:
第八步:打开
TestCases软件,按照图中标注操作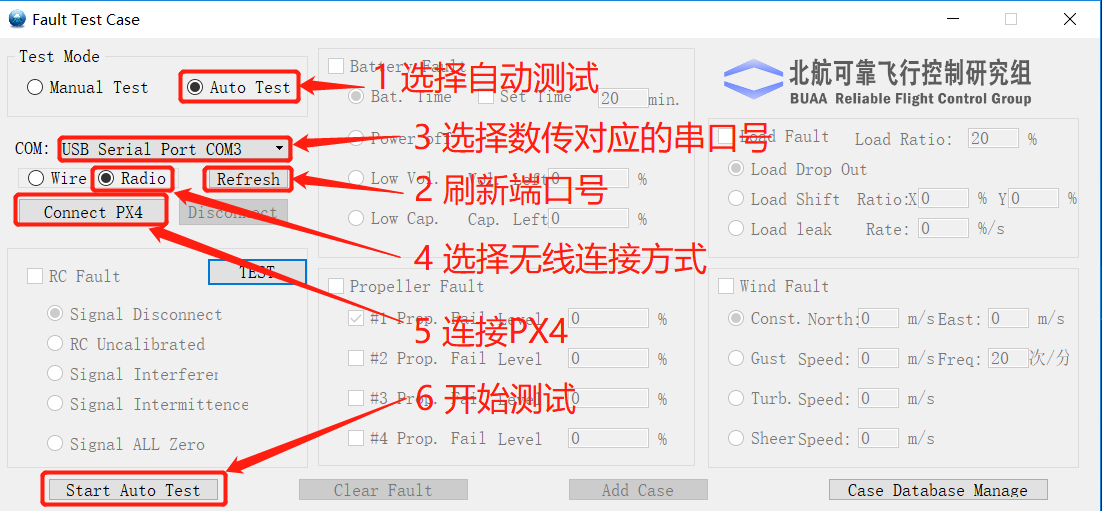
弹出新的窗口中,单击开始即可开始自动化测试,测试用例全部测试完成后,可以点击窗口右下侧
生成报表以生成Word报告。后面按照弹出的对话框提示操作即可。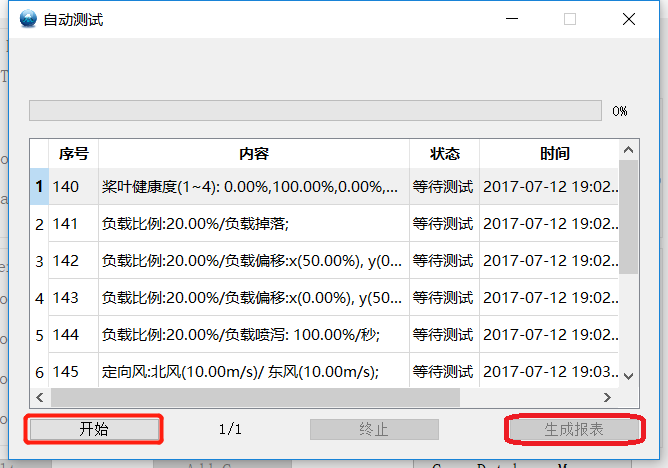
生成的报告在TestCases软件(不是桌面快捷方式)目录下的
outputReport文件夹中,可参考下图: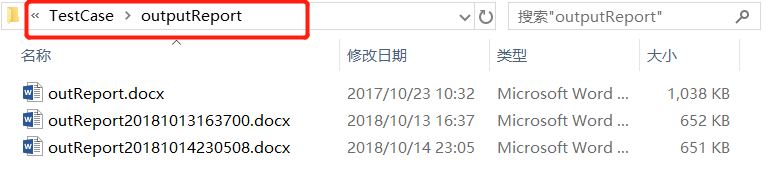
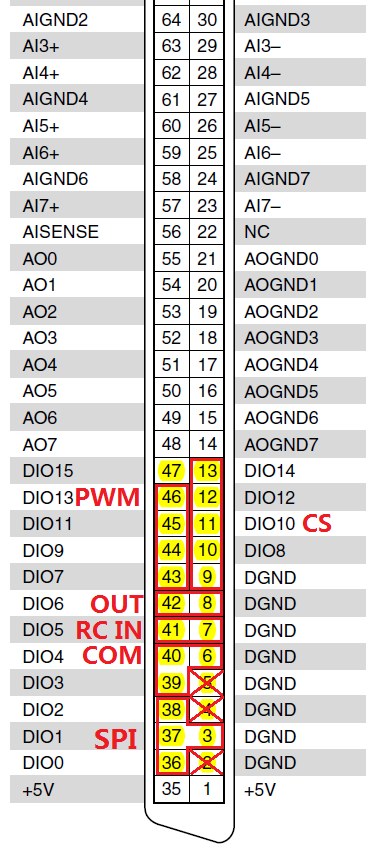
4.5 硬件接口与技术细节
关于PXI机箱上FPGA板卡接口引线可以参照下图,实际上也可以通过查看Labview中的FPGA程序框图得知硬件引脚的对应关系。主要使用FPGA板卡7846R上的Connector0接口,下图即是Connector0的接口映射。